The EMD SD45 was manufactured starting in 1965 so that it
represents one of the newest prototypes available in Large Scale.
SD45's are still running all over the country, but they are getting
fewer over time due to very high miles in the last 30 to 35 years.
The EMD SD45 was manufactured starting in 1965 so that it
represents one of the newest prototypes available in Large Scale.
SD45's are still running all over the country, but they are getting
fewer over time due to very high miles in the last 30 to 35 years.
The SD-45 was the first locomotive that used an engine with more
than 16 cylinders. The 645 model engine in the SD45 carried 20
cylinders. The "645" in the model number indicated the displacement in
inches of the engine PER cylinder. This 2 stroke
engine developed 3600 horsepower, the largest on rails at the time it
was manufactured. The heat generated by the engine was so great that
extra radiator area was needed. The wider radiator resulted in the
flares on the rear of the long hood. Cooling air was taken in through
the side vents and exhausted out the top. This technique was borrowed
by other builders later to accommodate larger radiators.
There are two major variants of the SD45, the SD45-2 and the
SD45T-2. The variants had all new electricals and controls. Both rode
on an extended frame and lacked the sloped air intakes. The radiator
was extended in a longer hood. The SD45-2 had its air intakes along the
top of the hood. The SD45T-2 (tunnel motor) took in air through vents
on the sides set down near the walkways. There was nothing inside the
hoods in this location and you could look right through the loco and
out the other side. This arrangement was developed by the Southern
Pacific so that the engines could draw in somewhat cooler air in
tunnels. The last unit of a MU consist would often suck in superheated
air in a long tunnel because of the blast of engine exhaust from the
lead units. It could then overheat and shutdown with disturbing
results, such as a stalled train in a tunnel. The "tunnel motors" with
the relocated intake grills had a better chance of drawing in cooler
air from nearer the track and tended to hold up better in long tunnels
and snowsheds. The SD40 and SD40T-2 had the same frame and cooling
arrangement as their more powerful brethren, but carried a 16 cylinder
model 645 engine which developed 3000 hp. Eventually, the higher
maintenance costs of the SD45 lead the railroads to purchase far more
SD40's than SD45's.
Contents
 The Aristo SD45 is a 1/29 scale model of a standard issue
SD-45. These locos were found on railroads all over the country.
The Aristo SD45 is a 1/29 scale model of a standard issue
SD-45. These locos were found on railroads all over the country.
The sloping air intake grills are clearly visible in this photo.
This is a major spotting feature of the SD45.
The engine is heavily weighted, stock it comes in at 18 lbs, and has
the pulling power to match. See the section on pulling power below for
the details of my initial round of testing. There is a long steel
channel that runs the length of the frame and 3 lead weights inside the
fuel tank. These lead weights can be removed if the weight is not
desired by removing the tank (four clip tabs accessible from inside)
and then removing 3 nuts on three bolts that come up through the frame.
Each nut is secured with a locking compound that must be cleaned off
the threads before the nuts can be removed. Once the weights are out,
there is ample room in the tank for a large battery pack.
The engine is shipped without the handrails installed, they must be
installed by the user. The handrails are all metal. Once the handrails
are installed, the loco won't fit back in its shipping box.
The engine is equipped with a new smoke unit that does a good job at
very low engine speeds. The lighting is constant intensity as well.
There are battery/MU connectors at each end of the loco, but to connect
two locos together, an adaptor connector (not supplied) is required.
Internally, the unit has a socket designed to accept a DCC decoder.
However, nobody yet has marketed a decoder or R/C RX that plugs right
in.
Right out of the box, the engine made some pretty loud gear noise.
It did quite down quite a bit during break in. All twelve wheels pick
up power and none have traction tires. With the very heavy weight of
this loco, it clearly doesn't need traction tires. Power pickup was
quite good even on dirty track. This may be partially due to the weight
of the loco which can allow the wheels to bear through minor track
contamination.
The locomotive tracks very gracefully. I had seem some comments
about how the unit "glides" through turnouts but I didn't understand it
until I saw it in action. It tracks through turnouts without any sign
of being on a turnout, no jerks, no dips, and no derailments. Each axle
has considerable sideways slop to allow the long wheelbase trucks
negotiate curves without binding. The method seems to work very
well.
The slow speed performance of the unit is outstanding. It is very
steady at very low speed and it is easy to control. When it gets DCC
installed, it will be exceptionally smooth. The only other loco that
runs this well at low speed is the Bachmann Shay and it became an
incredible performer when it got DCC (and better power pickups). The
Shay might make a better switch engine than the SD45 only because the
truck mounted couplers allow it to couple better on curves. Other than
that, the SD45 is an outstanding switcher as well as an exceptional
road engine.
There are four switches to control the electrical functions of the
loco. These are located under the dynamic brake pods/fan assembly on
the top at the center of the long hood. Be sure that you don't lift the
loco by the pods, they'll come off and you'll drop the loco. Pull the
pod assembly straight off to reveal the switches. If the pod assembly
doesn't come off straight, the clips will bend. Then they have to be
straightened to get the pod assembly back on. I removed the spring
clips from mine as I get into that area often to turn the sound system
on and off and I got tired of straightening them. The pod assembly
seems quite secure without the clips.
The POWER switch controls the connections to the
track. If you run battery power of any kind, TURN IT OFF AND
LEAVE IT OFF. If you don't, you'll get smoke from somewhere.
If you install internal batteries or never intend to run the engine
from track power ever again, drop a glob of hot glue on the switch so
that it doesn't get flipped accidentally.
The MOTOR switch disconnects the motors in all
modes of operation, even if a DCC decoder or R/C RX is installed
provided that the installer actually used the provided DCC decoder
connections. If you have a custom DCC or R/C installation done, your
installer may elect to bypass Aristo's motor wiring so that the switch
may or may not continue to function.
The SMOKE switch is pretty obvious. It turns the
smoke unit on or off. The smoke unit itself is designed to protect
itself in the event that it runs dry so it is not really necessary to
turn it off, but if you don't use smoke, there is no need to power it.
The smoke unit runs directly from the internal power bus which is
permanently connected to the battery connectors at each end of the
loco. When the Power switch is on, this bus is connected to the
track.
The LIGHT switch turns on or off all of the
lighting. It disconnects the lighting loads from the internal lighting
power supply, but it leaves the power supply itself connected. This can
be a problem for DCC installations, but a remedy is described below in
the DCC section. If you have a custom R/C or DCC installation done, the
installer may elect to wire some of the lighting from another source so
that this switch may or may not affect those modified functions.
[ Top ]
I noticed a derailment problem with this engine as it came out of
the box. The engine itself tracks very well and didn't derail at all
during my short period of testing. However, when hauling a long train,
the first car would often derail on a curve. This is a common problem
that occurs with cars with truck mounted couplers when being pulled by
a loco with body mounted couplers. The sideways movement of the
engine's coupler while the engine is in a curve pushes sideways on the
car's coupler and twists the car's truck clean off the rails. The
coupler spring on this SD45 is pretty stiff and this may be
contributing to this problem. Aristo has softened up the spring on
current production units so this may or may not continue to be a
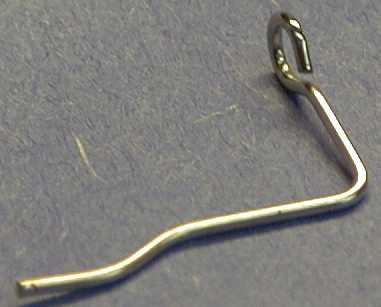
problem. In any event, a softer spring can be bent from a smaller gauge
of music wire.
[ Top ]
I ran my standard tractive effort tests on the SD45, and as expected
it did quite well. As a matter of fact, it almost did too well. I kept
bringing out more and more cars and it kept going and going. I nearly
ran out of grade before I decided that the engine had had about enough.
The train was about 56 feet long. See my Tractive Effort Tests page
for more details.
The SD45 testing revealed that it was able to pull about as many
cars as the very best previous puller that I have tested, the Bachmann
Shay. I brought the DCC equipped Shay out for a retest and found that
it was still doing well. Both the Shay and the SD45 will accept quite a
load and even if they slip trying to start a train on the grade,
they'll eventually find their feet and start gripping the rails. Since
I wasn't able to tell which was actually pulling better on the grade
(because I had literally run out of grade) I elected to stage a
tug-o-war.
 I put the SD45 and the Shay on opposite sides of a track
block and put a car with plastic wheels between them as the "rope." The
SD45 was running from a Train Engineer in PWC mode and the Shay from
DCC and I didn't want a wheelset crossing the insulated block and
shorting the two power supplies together. The only car that I had left
with plastic wheels was Clarabel from a Thomas the Tank Engine set.
Poor Clarabel was hard put to deal with the buffing forces it saw
during this test. It literally picked itself up from the rails.
I put the SD45 and the Shay on opposite sides of a track
block and put a car with plastic wheels between them as the "rope." The
SD45 was running from a Train Engineer in PWC mode and the Shay from
DCC and I didn't want a wheelset crossing the insulated block and
shorting the two power supplies together. The only car that I had left
with plastic wheels was Clarabel from a Thomas the Tank Engine set.
Poor Clarabel was hard put to deal with the buffing forces it saw
during this test. It literally picked itself up from the rails.
Neither the Shay or the SD45 could do much to pull the other engine
when the other engine was stopped. There was some movement in either
direction, but not much. When the SD-45 and the Shay were both pulling
away, sometimes the SD45 would win and sometimes the Shay would win.
Over a series of tests, the SD45 did slightly better and it was pulling
uphill. Several times, I did pull one or the other engine across the
rail gap and I did short the power supplies together anyway. I heard a
lot of DCC noise coming from the SD45, but neither engine nor either
power supply was damaged or even blew a fuse.
After the SD45 had been converted to DCC and the bricks modified to
get all the wheels resting on the track (see the section below on the
SD45 bricks), I ran the tug-o-war again. However, since both locos now
had DCC, I didn't have to mess with a "rope." I could couple them
together directly and run them from the same booster. To my surprise,
this time the Shay did a little better. It could drag the SD45 just a
little and the SD45 couldn't drag the Shay. With both pulling away, the
Shay could drag the SD45 with all wheels on both locos slipping.
Perhaps the "improved" weight distribution actually results in slightly
less traction. The Shay weighs about the same as the SD45 but carries
its weight on 8 wheels instead of 12.
 Since the SD45 has four motors, I wanted to
see how much average current that it would draw under no load at all. I
set the engine up on the bench and connected it with a Kadee contact
brush and measured the IV characteristic. At voltages less than 3.5
volts, the unit is stalled so that the motors look like a resistor. As
soon as the wheels start to turn, the current drops due the generation
of some back emf by the motors. At higher voltages, the current tends
to flatten out as it typical of small DC motors. With no load at all,
the unit draws 1.8 amps. During my pulling power tests, the average
current ran near 3.5 amps. It'll take some good batteries to keep this
loco running for any period of time.
Since the SD45 has four motors, I wanted to
see how much average current that it would draw under no load at all. I
set the engine up on the bench and connected it with a Kadee contact
brush and measured the IV characteristic. At voltages less than 3.5
volts, the unit is stalled so that the motors look like a resistor. As
soon as the wheels start to turn, the current drops due the generation
of some back emf by the motors. At higher voltages, the current tends
to flatten out as it typical of small DC motors. With no load at all,
the unit draws 1.8 amps. During my pulling power tests, the average
current ran near 3.5 amps. It'll take some good batteries to keep this
loco running for any period of time.
The loco was measured to as close to true stall as I could get at 16
VDC. I had to REALLY press the loco into the test track to get it near
a true stall, but the wheels never did quite stop. The steady state
stall current was 8.8 amps. This is pretty respectable for a four motor
loco, most with two motors draw nearly as much. This could be due to
either low stall current motors, or due to higher internal wiring
resistance.
[ Top ]
Kadee couplers can be mounted to the SD45 in a similar fashion to
the method that I also used on the RS-3 and the Center Cab. I prefer to
use #831 boxes and couplers if possible because I've got a whole bunch
of them. In this case the large offset coupler that comes with the
Kadee #831 kit is not suitable. I used the medium offset coupler that
comes in the #836 kit and the #831 boxes.
The original coupler is a little difficult to remove, but if the
pilot is gently flexed, it'll come out. It will come out more easily if
the 4 screws that secure the pilot are removed. There are two that
screw into the frame and two that hold the front and back parts of the
pilot assembly together. With these screws taken out, the pilot will
still not come off, but the parts can be flexed enough to get the old
coupler out and a new one in. Note that the steps may partially or
fully fall out. Make sure that you've got them back in correctly before
reinstalling the screws. The spring can be removed by rotating the
truck so that the spring can come out between a wheel and the brick
body.
 All of the cutting and grinding is done
on the coupler body itself. Except for trimming and bending the
centering spring, no permanent modifications are made to the loco
itself. For a completely reversible installation, a new centering
spring can be bent from music wire and the old spring and couplers can
be kept on the side.
All of the cutting and grinding is done
on the coupler body itself. Except for trimming and bending the
centering spring, no permanent modifications are made to the loco
itself. For a completely reversible installation, a new centering
spring can be bent from music wire and the old spring and couplers can
be kept on the side.
First the pivot hole in the coupler body needs to be drilled out to
0.218". Then a 0.080" styrene shim is glued in between the side rails
behind the hole. 30 additional mils of shim material is glued along the
side rails of the coupler box and on top of the 80 mils already added.
I also cut a shim from some 0.218" OD styrene tube to use a spacer
under the mounting screw to allow it to snug down without binding the
coupler. The coupler then came out at the right height in a static
test. The shims and the side rails will ride on the ridges of the
coupler mounting post and this sets the coupler height. A #70 hole is
drilled in the back of the coupler body to accept the centering spring.
Finally, the back corners of the body are ground off at a 45 degree
angle so that the coupler body will have sufficient swing to avoid
dragging the following cars off the track.
The coupler box may still interfere with the brake hose assembly on
one side. This did cause me some problems as I still got some
derailments in right turns. I twisted the brake hose slightly so that
the coupler box hits the pilot assembly before it hits the brake hose.
If following car derailments are still a problem, then the opening in
the pilot will need widening.
With the shims glued into the coupler body, it is difficult to get
it back on the post. However, if the mounting screws for the pilot
assembly are removed, the pilot will flex just enough to allow the
coupler body to slip by and settle on the post.
The mounting post itself is sturdier than the posts on earlier
Aristo locos but it will still flex under a heavy load. When it does,
the coupler will tend to rise. There doesn't seem to be much available
room at the base of the post to reinforce it. The stock Aristo coupler
will not suffer a problem due to this difficulty because it has a lift
lock feature that prevents a coupler pair from dismating due to
mismatched height.
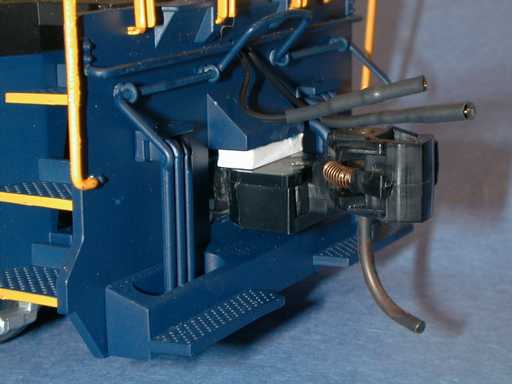 Under load, the
Kadee coupler still tended to rise just a little. A spacer was cut from
0.125" x 0.250" styrene strip and glued underneath the end of the pilot
(white block in the photo) so that the spacer rides on the top of the
coupler box. This locks the coupler box at the right height and it
cannot rise. After the photo, the spacer got a coat of Santa Fe blue
and it became nearly invisible.
Under load, the
Kadee coupler still tended to rise just a little. A spacer was cut from
0.125" x 0.250" styrene strip and glued underneath the end of the pilot
(white block in the photo) so that the spacer rides on the top of the
coupler box. This locks the coupler box at the right height and it
cannot rise. After the photo, the spacer got a coat of Santa Fe blue
and it became nearly invisible.
Tests with a heavy train with a very light car in front indicate
that this coupler mount works better than the stock one did. The test
was so sensitive that I found a turnout that needed a little filing on
the points and one other spot that was out of level. When these things
were fixed, I could run the train either way without derailments. The
coupler body would rotate all the way to the stops so that it is pretty
clear that a mount with less rotation capability would cause some kind
of trouble especially in "S" curves of which I have several. With the
stock coupler, the a test train (with a heavy car in the front instead
of a light car) would derail in several spots around the layout.
 The centering
spring is a little difficult to remove initially, but when cut short
and formed, it goes back in much easier. You may have to play with the
spring forming a little to get it right. I trimmed the stock spring.
The Kadee coupler has softer springs that center the coupler in the box
than the Aristo coupler so that the slightly stiff box centering spring
is not a major problem with the Kadee coupler.
The centering
spring is a little difficult to remove initially, but when cut short
and formed, it goes back in much easier. You may have to play with the
spring forming a little to get it right. I trimmed the stock spring.
The Kadee coupler has softer springs that center the coupler in the box
than the Aristo coupler so that the slightly stiff box centering spring
is not a major problem with the Kadee coupler.
The coupler body sticks out from the pilot a little more than I
would like, but mounting it deeper would require that the opening in
the pilot be widened to allow the coupler body to rotate enough. We'll
see how well this mount works out in the long run. I may remount them
later to pull them back in a little more at some future date.
[ Top ]
 The SD45 has an unusual lighting arrangement.
The lighting power runs from an internal PWM converter so that full
lighting power can be obtained before the loco starts to move. The
engine starts to move at about 4 volts, and this is about where the
lights have reached full intensity. This photo was taken with the
motors on, but the track voltage was not quite high enough to get the
loco to move. There is no perceptible difference in lighting intensity
when switching between PWC and Linear power.
The SD45 has an unusual lighting arrangement.
The lighting power runs from an internal PWM converter so that full
lighting power can be obtained before the loco starts to move. The
engine starts to move at about 4 volts, and this is about where the
lights have reached full intensity. This photo was taken with the
motors on, but the track voltage was not quite high enough to get the
loco to move. There is no perceptible difference in lighting intensity
when switching between PWC and Linear power.
As can be seen from the photo, the cab and number boards are also
illuminated. There are safety lights for the crew at the base of the
short and long hoods and at the step at the center of the long hood on
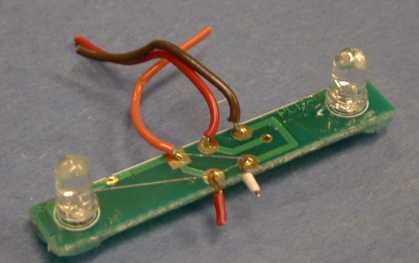
the fireman's side. There are also two LEDs at either end that show red
to the rear. They are not illuminated to the front.
If you look down into the rearmost fan, a green light is visible.
This is just the number board bulb showing through the green tinted
circuit board.
The internal PWM power converter generates a pulse stream at about a
200 uS period with varying peak voltage (depending on the track
voltage) and pulse width. The duty factor is about 10% at full track
voltage and increases at lower voltage. The internal bus voltage then
appears to be about 2 volts RMS. The headlights are incandescent bulbs
that appear to operate at nominal intensity at 6 volts DC. However,
since they are being pulsed, they tend to draw more current than they
would with straight DC and operate brightly at this low average
voltage.
 This is a
schematic of the wiring of the SD45 headlight circuits. All the lights
run from the internal PWM power source. The front headlights and the
rear markers are connected together as are the rear headlights and the
front markers. The number board lamps and porch lamps run in both
directions.
This is a
schematic of the wiring of the SD45 headlight circuits. All the lights
run from the internal PWM power source. The front headlights and the
rear markers are connected together as are the rear headlights and the
front markers. The number board lamps and porch lamps run in both
directions.
A white LED cannot be operated at its best efficiency under these
conditions. LEDs are current driven devices, but they get inefficient
at high current drive. One just cannot ram 10 times the current in them
for 10% of the time and expect anything like the same intensity. For an
LED to work properly, it'll have to be run from a current limited DC
source.
Aristo applies a filter capacitor and current limiting resistor to
the red LEDs used for the markers. These parts provide a constant DC
bias to the LED's, but the LEDs get only about 4 mA on the average. I
tried to run a white LED with a 100 ohm limiting resistor and an
appropriate filter capacitor to get about 20 mA of average current but
it didn't work too well, the LED pulsated rather badly.
 In
my DCC installation, I just wired the power side of the two LEDs in
series with a 1K resistor back to the blue wire on the decoder. If you
don't have decoder, then run them from the +20 volt internal bus in the
loco. The switched end of the LEDs can go back to the appropriate pad
on the headlight board (the one connected to the diode, a cylindrical
part). Since the stock headlight wire is blue too, don't get it
confused with a decoder blue wire. A decoder will supply about 20 volts
on its blue accessory wire.
In
my DCC installation, I just wired the power side of the two LEDs in
series with a 1K resistor back to the blue wire on the decoder. If you
don't have decoder, then run them from the +20 volt internal bus in the
loco. The switched end of the LEDs can go back to the appropriate pad
on the headlight board (the one connected to the diode, a cylindrical
part). Since the stock headlight wire is blue too, don't get it
confused with a decoder blue wire. A decoder will supply about 20 volts
on its blue accessory wire.
The actual headlight assemblies at both ends are held in with great
globs of hot glue and are fairly difficult to remove. The actual
headlight bulbs are encased in more hot glue and are virtually
impossible to remove without remelting the glue into a sticky mess with
a hot air gun or literally destroying the bulbs if the glue globs are
just pried out. This is not really a problem because if you are pulling
the bulbs, you are going to replace them anyway.
The front headlight circuit board can be freed by popping off the
hot glue that holds it in place and then by pulling the number board
assembly straight off. The wires to the bulbs will break, but no
matter. Then the board can be removed. If you are really careful, and
lucky, you might be able to work the front PWB out the front without
breaking the wires, but you'll be cutting them anyway.
 The rear
board can be worked out by removing the glue globs. Be aware that the
glue may adhere to some of the chip parts on the rear board and if you
are not careful, you may rip some of them off the board. Where glue
covers some parts, it may be better to heat it with some hot air so
that it will soften. It'll make a bigger mess, but it won't rip up the
boards. The rear lighting board is retained by small ridges in the
sidewalls of the body. The board should be worked straight forward so
that the marker LEDs will clear the holes in the body before the board
is moved upward or downward. It is much easier to work with this board
if the speaker assembly is removed first. Note that the marker LEDs are
actually installed in little sockets, one of the LEDs in the photo is
laying loose on the board. They can be plugged in either way but will
only work in one direction. The smaller electrode inside the plastic
lens goes toward the nearest edge of the board.
The rear
board can be worked out by removing the glue globs. Be aware that the
glue may adhere to some of the chip parts on the rear board and if you
are not careful, you may rip some of them off the board. Where glue
covers some parts, it may be better to heat it with some hot air so
that it will soften. It'll make a bigger mess, but it won't rip up the
boards. The rear lighting board is retained by small ridges in the
sidewalls of the body. The board should be worked straight forward so
that the marker LEDs will clear the holes in the body before the board
is moved upward or downward. It is much easier to work with this board
if the speaker assembly is removed first. Note that the marker LEDs are
actually installed in little sockets, one of the LEDs in the photo is
laying loose on the board. They can be plugged in either way but will
only work in one direction. The smaller electrode inside the plastic
lens goes toward the nearest edge of the board.
The boards can be reinstalled without any hot glue and they will
stay in place well enough. If you really feel the need to secure them,
use a VERY SMALL dab of hot glue. The monster globs installed at the
factory simply aren't necessary.
 A
5 mm white LED will fit back in the headlight holes. Just enough sticks
out to simulate a headlight lens. Then a small dab of
hot glue can be dropped back in to secure the LEDs. The blue wire in
the photo is the new wire that goes back to the DCC decoder blue wire
or pin 6 of the DCC socket. I trimmed off an unused corner of the board
to allow the wire to get past the board without the wire being pinched.
The green wire solders back to the board to use the existing wiring to
connect the headlight back to the DCC socket.
A
5 mm white LED will fit back in the headlight holes. Just enough sticks
out to simulate a headlight lens. Then a small dab of
hot glue can be dropped back in to secure the LEDs. The blue wire in
the photo is the new wire that goes back to the DCC decoder blue wire
or pin 6 of the DCC socket. I trimmed off an unused corner of the board
to allow the wire to get past the board without the wire being pinched.
The green wire solders back to the board to use the existing wiring to
connect the headlight back to the DCC socket.
When I first tested this circuit, the headlights wouldn't go off,
they got dimmer, but nowhere near off. It turns out that the red LEDs
in the markers have a fairly low reverse breakdown voltage and they
were clamping the control voltage to a maximum of 12 volts. I had to
install another diode in series with the markers on both ends to get
the headlights to go off when they were supposed to. Cut the red wire
going to the front markers (middle wire on the connector) and the
orange wire going to the rear lighting board and insert a diode with
the arrow pointing back to the main board. These diodes will become
reversed bias when the lights are supposed to be off and block the red
LEDs from drawing any current and holding the headlights on. There are
similar diodes already on the headlight boards to block reverse
currents in the headlights.
The lights behind the number boards also illuminate the cab.
However, they are pretty bright and actually show through the number
board housing. While you have it off, you should paint the inside with
a couple of coats of Engine Black paint.
Both the Soundtraxx Sierra sound system and the NCE D408SR DCC
decoder that I have installed support both Type 1 and Type 2 ditch
lights. I tested both and I find that the effect from the Sierra is
better because the ditch lights stay flashing longer after the horn
trigger is removed. The Sierra provides about 3 seconds of delay
following the completion of the horn sequence, the D408SR provides
about 5 seconds from the release of the F2 key which is the beginning
of the horn sequence. Since I will be running the Sierra in the
triggered mode, this results in longer ditch light operation. They will
also operate if the horn autotriggers. For type 2 ditch lights (lights
off if they are not flashing), the actual lighting effect is about the
same. The type 1 ditch light (lights on when not flashing) doesn't work
quite right on the D408SR. If the ditch lights are programmed to be off
in reverse, only the flashing effect goes off, the
actual lights stay on. This is probably a bug in the decoder
firmware.
After looking at every photo of an SD45 I could find, I saw no
example of any lighting that could be a ditch light EXCEPT the two
lights on the low hood that Aristo uses as markers. I have elected to
remove them and use them as ditch lights instead by replacing the red
LEDs with white LEDs and wiring them back to the Sierra. This takes 3
additional wires between the body (where all the other electronics are)
and the frame (where the low hood is). The Sierra's lighting output is
6 volts so a 180 ohm resistor is needed in series with each LED to set
the current to about 20 mA.
 The only
original lighting left in the low hood is the porch light. Since the
mounting points for the LEDs on the board were immersed in hot glue and
I didn't feel like cleaning up the board, I elected to abandon the
board and wire the lights direct. Note that these LEDs are in sockets
as well.
The only
original lighting left in the low hood is the porch light. Since the
mounting points for the LEDs on the board were immersed in hot glue and
I didn't feel like cleaning up the board, I elected to abandon the
board and wire the lights direct. Note that these LEDs are in sockets
as well.
 I initially used
the front hood lights as ditch lights, but I came down with a case of
RCD (Rivet Counter's Disease) and made some more legitimate ditch
lights. I scoured the internet and found several photos of SD45-2's
with more conventional ditch lights (Santa Fe's SD45-2 Fleet) so I figured that if ATSF backfitted SD45-2's with
this kind of light, they might have done some SD45's as well. These
ditch lights were made from a piece of 0.080" styrene sheet with an LED
mounted in a 0.200" hole. A piece of 0.25" OD tubing makes the cowl.
The wires were covered with black shrink tubing and the whole works was
painted engine black. The LED lens was then cleaned off with a Q-tip
soaked in lacquer thinner and mounted on the frame of the SD45.
I initially used
the front hood lights as ditch lights, but I came down with a case of
RCD (Rivet Counter's Disease) and made some more legitimate ditch
lights. I scoured the internet and found several photos of SD45-2's
with more conventional ditch lights (Santa Fe's SD45-2 Fleet) so I figured that if ATSF backfitted SD45-2's with
this kind of light, they might have done some SD45's as well. These
ditch lights were made from a piece of 0.080" styrene sheet with an LED
mounted in a 0.200" hole. A piece of 0.25" OD tubing makes the cowl.
The wires were covered with black shrink tubing and the whole works was
painted engine black. The LED lens was then cleaned off with a Q-tip
soaked in lacquer thinner and mounted on the frame of the SD45.
There is a page on the
internet that describes all manner locomotive lighting. Ditch and
crossing lights are described there as well. However, the ditch light link is bad, this is the direct link to the ditch light page.
 The
ditch light mounts are simply glued to the deck and aimed "crosseyed"
and down so that the lights illuminate the track in front of the loco
well. Real ditch lights are crossed at an angle of about 1 degree so
the lights will cross several hundred feed down the track. This
maximizes the visual impact of the lighting so that the loco can be
most easily seen from a great distance. Since even our while LED
headlights don't make that bright a beam, these lights are crossed at a
much larger angle to light up a swath in from of the loco. They are
also aimed down slightly. I did my aiming by eye for the best effect, I
haven't tried to measure the resulting angle, but it's probably about 5
degrees.
The
ditch light mounts are simply glued to the deck and aimed "crosseyed"
and down so that the lights illuminate the track in front of the loco
well. Real ditch lights are crossed at an angle of about 1 degree so
the lights will cross several hundred feed down the track. This
maximizes the visual impact of the lighting so that the loco can be
most easily seen from a great distance. Since even our while LED
headlights don't make that bright a beam, these lights are crossed at a
much larger angle to light up a swath in from of the loco. They are
also aimed down slightly. I did my aiming by eye for the best effect, I
haven't tried to measure the resulting angle, but it's probably about 5
degrees.
[ Top ]
 The SD45 is equipped with a new kind of a smoke unit.
This unit generates a fair volume of smoke and shuts itself off when it
runs out of smoke fluid so that it won't ever burn up. This feature
does seem to work but it behaves differently depending on what kind of
power is applied.
The SD45 is equipped with a new kind of a smoke unit.
This unit generates a fair volume of smoke and shuts itself off when it
runs out of smoke fluid so that it won't ever burn up. This feature
does seem to work but it behaves differently depending on what kind of
power is applied.
With Aristo PWC on the track, the smoke unit will run until it runs
nearly dry, then it will cycle off and on about a 2 second interval.
With DC on the track, when it runs down, but is not completely dry, it
will simply shut down and stay shut down until the power is interrupted
for a few seconds and restored.
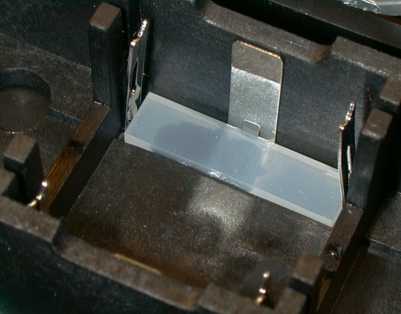
 The smoke unit itself is built into a small
plastic box which contains entire unit including its fan. On the end of
the box, there is a two pin connector. The air intake is on the
bottom.
The smoke unit itself is built into a small
plastic box which contains entire unit including its fan. On the end of
the box, there is a two pin connector. The air intake is on the
bottom.
 The unit
contains a fair amount of electronics to control the smoke unit and
regulate its smoke output. The smoke element itself is a typical Aristo
wire wound heater element wrapped in a fiberglass wick. The wick
extends into a fluid sump that can hold a large quantity of fluid.
Fluid is drawn by the wick up to the element. When the unit finally
does shut down, the sump and the wick are virtually dry.
The unit
contains a fair amount of electronics to control the smoke unit and
regulate its smoke output. The smoke element itself is a typical Aristo
wire wound heater element wrapped in a fiberglass wick. The wick
extends into a fluid sump that can hold a large quantity of fluid.
Fluid is drawn by the wick up to the element. When the unit finally
does shut down, the sump and the wick are virtually dry.
 The small compartment
is the fluid sump, the large hole is the air intake for the fan. This
sump can be filled half full and it won't slow the unit down.
The small compartment
is the fluid sump, the large hole is the air intake for the fan. This
sump can be filled half full and it won't slow the unit down.
Even though the performance of the unit is not impacted much by the
quantity of smoke fluid, the unit seems to like some kinds of fluid
much more than others. The unit ripped through 60 drops of LGB fluid in
just 8 minutes and didn't even make a very strong plume. 10 drops of
Bachmann fluid lasted 3 minutes and was much denser. See the table
below for the relative performance of various fluids in this unit.
 The unit
makes full smoke at about 8 volts on the track. The smoke element
itself runs 5.8 volts (on my unit anyway) and this stays virtually
constant at higher track voltages.
The unit
makes full smoke at about 8 volts on the track. The smoke element
itself runs 5.8 volts (on my unit anyway) and this stays virtually
constant at higher track voltages.
 The
power dissipation of the unit increases rapidly with increasing input
voltage until the unit begins to regulate at about 8 volts. Then as the
voltage increases, the input current decreases so that the unit
dissipation does not increase nearly as fast with increasing power
input. This characteristic is unlike linearly regulated constant
intensity smoke systems which keep the smoke intensity constant, but
draw significantly increasing power at higher track voltages.
The
power dissipation of the unit increases rapidly with increasing input
voltage until the unit begins to regulate at about 8 volts. Then as the
voltage increases, the input current decreases so that the unit
dissipation does not increase nearly as fast with increasing power
input. This characteristic is unlike linearly regulated constant
intensity smoke systems which keep the smoke intensity constant, but
draw significantly increasing power at higher track voltages.
LGB smoke fluid works exceptionally well in LGB smoke units, but it
doesn't do too well in the Aristo units, the SD45 unit being no
exception. The smoke density and duration are a strong function of the
type of fluid used. The table below indicates the duration and relative
density of smoke obtained from various fluids. Aristo's own smoke fluid
is not in the list because none of the retailers near my home carry it
so I don't have any.
It is interesting to note that the fluids that make the most smoke
density also last the longest. I believe that the LGB and the Lionel
fluid are similar, both being formulated to operate in Seuthe smoke
generators.
Smoke Fluid Duration in the SD45 Smoke Generator
20 Drops
| Fluid Type |
Duration Until Shutdown |
Relative Smoke Density |
| LGB |
2 min |
Light |
| Bachmann |
5 min |
Medium |
| San-Val Magic Smoke |
4.5 min |
Medium |
| Dept 56 Magic Smoke |
7.5 min |
Medium Heavy |
| Lamp Oil |
6.25 min |
Medium |
| Lionel |
2 min |
Light |
[ Top ]
 I've measured the SD45 as best I can with a
caliper and measuring tape and it comes out pretty close to 1/29 scale
for the body dimensions that I evaluated. The "Corrected" column is the
actual loco dimension referenced to the rail head as the height
dimensions were actually measured from the shelf that the track was
sitting on.
I've measured the SD45 as best I can with a
caliper and measuring tape and it comes out pretty close to 1/29 scale
for the body dimensions that I evaluated. The "Corrected" column is the
actual loco dimension referenced to the rail head as the height
dimensions were actually measured from the shelf that the track was
sitting on.
My reference for scale is the drawing shown in the Model Railroader
Cyclopedia - Volume 2. There is a 10% error in the wheel gauge, but
this is by design, 1/29 scale doesn't fit on 45 mm track (1/32 scale)
without some error.
The SD45 does have some significant overhang, but it isn't any worse
than the other very long rolling stock available. On an ~4' radius (8'
diameter AKA R3 curve) the front and rear steps overhang to the outside
by 1 7/8" measured from the inside of the outside rail. The center of
the loco hangs inward by 2" from the inside of the inside rail.
While the loco won't reasonably run on 2' radius curves (R1), the
bricks will and without binding. I have heard from one user that has a
few 2.5' radius (R2) curves and the loco makes it around those curves,
but not gracefully. The coupler swing is too severe and the loco will
derail the following cars.
[ Top ]
The SD45 has been, unlike many other locos, designed to be
disassembled by the user for installation of DCC, sound or R/C. There
are 6 screws on the bottom, clearly marked with arrows, that need to be
removed to remove the long hood. Four of these screws are around the rear truck and two more are near the back of the front truck. Pull these screws and the handrails
that attach to the cab and lift up the long hood. Most of the
cab will come off with the long hood. The frame and the hood are
connected by two keyed plugs that cannot be interchanged or plugged in
backwards. At this point, virtually all of the wiring is accessible to
allow accessory installation.
The short hood comes off with 4 additional screws located near the
corners of the assembly.
Don't remove any screws along the center line of the loco, these
hold on the weights and do not have be removed for interior access.
The entire power bricks can be removed by pulling 4 screws located
between each wheelset. Just the bottom covers of the trucks can be
removed by removing 8 small screws around the perimeter of the
cover.
The speaker assembly can be removed once the long hood is off by
removing 4 screws.
The lighting boards are glued in with excess quantities of hot glue.
this glue should be softened with a hot air gun before removal is
attempted.
[ Top ]
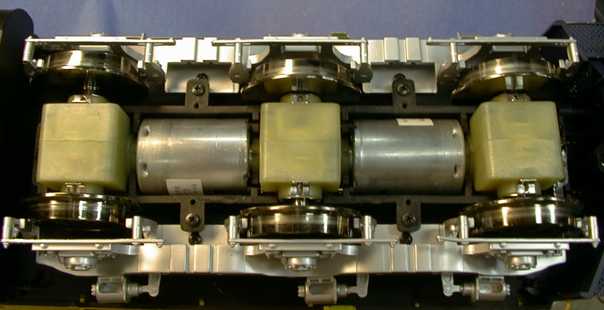 The Aristo model is powered by
FOUR can motors, two in each truck. All six axles are
powered through individual gearboxes. All six axles ride in ball
bearings and each gearbox has two more ball bearings for a total of 24
ball bearing assemblies in the loco.
The Aristo model is powered by
FOUR can motors, two in each truck. All six axles are
powered through individual gearboxes. All six axles ride in ball
bearings and each gearbox has two more ball bearings for a total of 24
ball bearing assemblies in the loco.
 The entire motor and gear train assembly can be easily
pulled in one piece. If you remove the 8 screws that hold on the brick
lower cover and turn the engine over, the whole assembly will literally
fall out provided that the motor contacts have not been soldered to
their contacts as has been done on some units.
The entire motor and gear train assembly can be easily
pulled in one piece. If you remove the 8 screws that hold on the brick
lower cover and turn the engine over, the whole assembly will literally
fall out provided that the motor contacts have not been soldered to
their contacts as has been done on some units.
Before the assembly is taken out, it is recommended that each motor
be marked for its position. I numbered the bottoms starting at 1 from
the front and drew an arrow pointing front. It is important to get the
motors back in correctly. If a motor is rotated a half turn, it will
run backwards. If you do lose track of the motor rotation, there is a
red dot on the end of each motor. This dot goes nearest the bottom of
the brick.
Its reasonable to mark on the gearboxes as well so that they can
reinstalled in the same positions, but this is not entirely necessary.
They can go in in either direction and they will still run right in
principle. Due to tolerances, some gearboxes might run better in one
position vs. another.
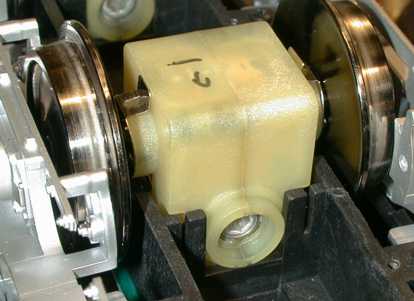
 All the truck power
pickup contacts are via sliding contacts. This photo shows the power
contact for the center gearbox. It is the metal tab going up the inside
of the brick housing. The motor power tabs slide into the fork
contacts. A soft plastic spacer is visible at the top of the brick.
There is another one on the other side of the brick. On some units,
there were TWO pads incorrectly stacked which materially messes up the
wheel loading of the brick.
All the truck power
pickup contacts are via sliding contacts. This photo shows the power
contact for the center gearbox. It is the metal tab going up the inside
of the brick housing. The motor power tabs slide into the fork
contacts. A soft plastic spacer is visible at the top of the brick.
There is another one on the other side of the brick. On some units,
there were TWO pads incorrectly stacked which materially messes up the
wheel loading of the brick.
The purpose of the compliant plastic pad is to limit the rotation of
the center gearbox. If the pads were not there, all the axles could
rock and the engine body would flop from side to side.
On some units, Aristo has soldered the motor tabs to the fork
contacts. I my opinion, this should not be done because is materially
complicates disassembly of the brick. There was apparently some concern
that the heating of the fork contact was contributing to brick heating
and lubrication failure. I suspect that soldering the tabs is overkill
and not really necessary. If your tabs are soldered and you need to get
the brick apart, the only practical way to do it is to remove the brick
from the loco and then cut the motor contact straps (the ones closer to
the centerline of the brick) and bend them so that the half straps can
be pulled out with the brick assembly. Of course, the straps are then
history and must be replaced upon reassembly. If you have to do this,
get some replacement straps BEFORE you reassemble the brick.
 The motor used in the SD45 appears to be a standard issue
Aristo motor. It has a DC resistance of 6.7 ohms which puts it right in
the class of the motors used in other Aristo locos (except the Pacific
which uses a larger one). The shaft is treated with a plastic ball-hex
fitting that mates in the hex socket of the worm in the gearbox. The
red dot which marks the motor tab polarity can be seen in this photo.
When the motors are reinstalled in the brick, all the tabs should be
nearest the bottom of the brick.
The motor used in the SD45 appears to be a standard issue
Aristo motor. It has a DC resistance of 6.7 ohms which puts it right in
the class of the motors used in other Aristo locos (except the Pacific
which uses a larger one). The shaft is treated with a plastic ball-hex
fitting that mates in the hex socket of the worm in the gearbox. The
red dot which marks the motor tab polarity can be seen in this photo.
When the motors are reinstalled in the brick, all the tabs should be
nearest the bottom of the brick.
 While the
motors were out, I measured the free run current along with the stall
resistance. These two motors were clearly in the same class as these
other two motors from a typical Aristo diesel. The stall resistance of
the older motors is a little lower (5 ohms or so) than the SD45 motors.
SD45 motor #2 draws a little more current at high voltage because it is
not perfectly balanced and it buzzes a little. This increases the load
and therefore the current.
While the
motors were out, I measured the free run current along with the stall
resistance. These two motors were clearly in the same class as these
other two motors from a typical Aristo diesel. The stall resistance of
the older motors is a little lower (5 ohms or so) than the SD45 motors.
SD45 motor #2 draws a little more current at high voltage because it is
not perfectly balanced and it buzzes a little. This increases the load
and therefore the current.
 The power contact
on the gearbox is screwed to the side of the gearbox and contacts the
ball bearing race. The half round bump slides along the tab inside the
brick housing. The housing is held together with 4 screws, but the
wheels have to be removed to access the screws.
The power contact
on the gearbox is screwed to the side of the gearbox and contacts the
ball bearing race. The half round bump slides along the tab inside the
brick housing. The housing is held together with 4 screws, but the
wheels have to be removed to access the screws.
 The wheels
are secured by a screw and lockwasher in the end of the axle. However,
since the wheel sits on a tapered shaft, it will usually be stuck in
place even if the screw is removed. A gear puller can be used to remove
the wheels but it is not really required. The wheels aren't on that
tight. A straight blade screwdriver can be placed next to the axle and
rotated against the back of the wheel. It doesn't take much pressure to
pop the wheel off. If more than light pressure is required to release
the wheel, the a gear puller should be used. Others have reported that
when they put too much pressure on the wheel to release it, the half
axle actually pulled out of the worm gear. A gear puller presses down
on the end of the axle and pulls the gear without placing any force on
the axle attachment.
The wheels
are secured by a screw and lockwasher in the end of the axle. However,
since the wheel sits on a tapered shaft, it will usually be stuck in
place even if the screw is removed. A gear puller can be used to remove
the wheels but it is not really required. The wheels aren't on that
tight. A straight blade screwdriver can be placed next to the axle and
rotated against the back of the wheel. It doesn't take much pressure to
pop the wheel off. If more than light pressure is required to release
the wheel, the a gear puller should be used. Others have reported that
when they put too much pressure on the wheel to release it, the half
axle actually pulled out of the worm gear. A gear puller presses down
on the end of the axle and pulls the gear without placing any force on
the axle attachment.
 The gearbox has plastic worm that engages a
plastic worm gear. The worm rides in two ball bearings. The half axles
are screwed into the sides of the worm gear and each rides in a ball
bearing. This gearbox was adequately lubricated. Since it is a
relatively time consuming task to get all six gearboxes apart, this
would seem to be a good place for Aristo to install a lube plug on some
future version of this gearbox.
The gearbox has plastic worm that engages a
plastic worm gear. The worm rides in two ball bearings. The half axles
are screwed into the sides of the worm gear and each rides in a ball
bearing. This gearbox was adequately lubricated. Since it is a
relatively time consuming task to get all six gearboxes apart, this
would seem to be a good place for Aristo to install a lube plug on some
future version of this gearbox.
On the first production run of the SD45, the factory apparently used
a less than ideal grease that breaks down at too low of a temperature
and runs out of the gearbox. This results in a dry worm and the worm
will eventually grind itself up. You can check to see if you have
adequate grease by running the loco with the lower truck covers
removed. If the grease in the boxes is adequate, you will see globs of
it moving around through the translucent gearbox material. If you
suspect that your boxes need grease, its a straightforward but time
consuming task to remove each one in turn, disassemble it and regrease
it. Use a good plastic compatible grease such as LGB gear grease.
 There is a single
ball bearing contact in each gearbox half. This contact rides on the
axle and provides an electrical path around the ball bearing race. The
race is electrically connected to the pickup contact so some current
will flow in the bearing races. If enough electrical current flows in a
ball bearing, it can pit the balls and races and cause the bearing to
wear much too quickly.
There is a single
ball bearing contact in each gearbox half. This contact rides on the
axle and provides an electrical path around the ball bearing race. The
race is electrically connected to the pickup contact so some current
will flow in the bearing races. If enough electrical current flows in a
ball bearing, it can pit the balls and races and cause the bearing to
wear much too quickly.
The ball is sitting on top of a spring that is in turn retained by
the metal clip on the outside of the gearbox half. Nothing retains the
ball except the grease. If the ball falls out, scoop up a little grease
on a small screwdriver and pick up the ball with the grease and then
slop the whole works back in the hole. Apply more grease to the ball if
it doesn't stay in place. When the axle is inserted, the ball is
depressed, the spring is compressed and the ball is then captured in
the hole that the spring sits in.
 I did notice that
the bricks seem to be "high centered" on the center axle by maybe 20
mils. Even with the weight of the loco on the central axle, the pads
didn't seem to compress enough to cause all the wheels to ride on the
track with even loading. I took out the pads and I found that it didn't
get any better. On this brick, the central gearbox didn't ride at the
same height as the other two axles, pads or not. It is riding on the
circular ridges on the gearbox that make up the motor mount which are
hard against the stops in the brick housing. I laid a piece of rail
across the wheels and found that it would rock on central axle.
I did notice that
the bricks seem to be "high centered" on the center axle by maybe 20
mils. Even with the weight of the loco on the central axle, the pads
didn't seem to compress enough to cause all the wheels to ride on the
track with even loading. I took out the pads and I found that it didn't
get any better. On this brick, the central gearbox didn't ride at the
same height as the other two axles, pads or not. It is riding on the
circular ridges on the gearbox that make up the motor mount which are
hard against the stops in the brick housing. I laid a piece of rail
across the wheels and found that it would rock on central axle.
I couldn't tell by measurement that the support ridge was higher
than the others, but it was clearly too high. Maybe the brick housing
is slightly warped or there is some other difficulty. I don't have a
microflat table and the dial indicators that it would take to
characterize it the problem exactly. Instead, I just ground about 10
mils of plastic off the ridges that support the central gearbox. Then
the gearboxes all rode at the same height and the test rail didn't
rock. Without the pads in place, the central axle might have been set
in a few mils more than the other axles causing the end axles to take up
all the load.
I put the pads back in and then the center gearbox was actually
resting on the pads. It was then a little high with no load (the engine
is on its back) but when the track is pressed down, the pads compress
and the gearbox settles down into the pads and the track doesn't rock.
The end axles then provide the hard support with the center axle being
compliant and conforming to the other two.
The other brick had exactly the same difficulty and required exactly
the same modification. Now all the wheels ride on the track and take up
load. The center axle is still loaded somewhat heavier than the other
two, but it is much better than it was. Without a truly equalized
suspension, getting the axle load fully balanced on a 3 axle rigid
truck will be very difficult. After the modification though, it is
close enough.
This issue may or may not afflict other locos. Before you do any
grinding, you should carefully evaluate your trucks. I initially
detected the problem by setting the engine on a flat piece of track and
then used a small screwdriver the lever up each wheel in turn. Before
the mod, it was obvious that one wheelset wasn't even resting on the
track. After the mod, it takes some force to lift each wheel and when
the force is released, the wheel drops back to the track with a very
audible click.
Aristo has addressed this problem when they rework bricks by moving
the pads to an end axle. This also tends to line up the axles without
any grinding on the brick housing.
 The SD45 power brick is
very easy to remove entirely. Just remove 4 screws (one between each
wheel) and the brick will literally drop out. There are no wires to
mess with. The contact straps on the brick contact pads on a board on
the loco truck bolster.
The SD45 power brick is
very easy to remove entirely. Just remove 4 screws (one between each
wheel) and the brick will literally drop out. There are no wires to
mess with. The contact straps on the brick contact pads on a board on
the loco truck bolster.
The long outer strips are the power pickups. The shorter inner
strips are the motor contacts. Each strip has two spring fingers formed
in it to provide a contact to the circuit board on the truck frame.
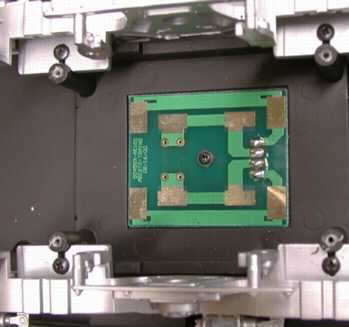 The contact
board on the truck bolster has large patches on it to contact the
strips along the top of the brick. This board is then wired through the
bolster and the frame to two small boards mounted on the frame topside.
These boards act as distribution points for track power and motor
power. There are transient suppressors installed on the other side of
this board that seem to be effective in suppressing radio noise.
The contact
board on the truck bolster has large patches on it to contact the
strips along the top of the brick. This board is then wired through the
bolster and the frame to two small boards mounted on the frame topside.
These boards act as distribution points for track power and motor
power. There are transient suppressors installed on the other side of
this board that seem to be effective in suppressing radio noise.
 After the
bricks were broken in for awhile, the slow speed performance of the
loco degraded instead of improving. The loco wouldn't run as slowly and
it tended to jerk to a start. The problem was in the front truck, it
didn't want to run smoothly anymore. After much fiddling around, I
determined that there was a concentricity problem between the some of
the motor shafts and the worms. This effect is indicated by a wobble
when a motor and gearbox are run together outside of the truck. Why
this began to be a problem after break in, I don't have a clue. In any
event, Aristo had apparently discovered the problem as well and asked
for the bricks back as they had a fix already in hand. When the bricks
were returned, the motor shafts were equipped with brass hex fittings
instead of the former plastic hex ball fittings. The old fittings fit
quite tightly into the worms, the brass ones slip fit. I don't know
when or if the brass fittings were incorporated into production but
Aristo indicated that all new production (at least after Oct 2001)
would be built this way.
After the
bricks were broken in for awhile, the slow speed performance of the
loco degraded instead of improving. The loco wouldn't run as slowly and
it tended to jerk to a start. The problem was in the front truck, it
didn't want to run smoothly anymore. After much fiddling around, I
determined that there was a concentricity problem between the some of
the motor shafts and the worms. This effect is indicated by a wobble
when a motor and gearbox are run together outside of the truck. Why
this began to be a problem after break in, I don't have a clue. In any
event, Aristo had apparently discovered the problem as well and asked
for the bricks back as they had a fix already in hand. When the bricks
were returned, the motor shafts were equipped with brass hex fittings
instead of the former plastic hex ball fittings. The old fittings fit
quite tightly into the worms, the brass ones slip fit. I don't know
when or if the brass fittings were incorporated into production but
Aristo indicated that all new production (at least after Oct 2001)
would be built this way.
These brass hex fittings are not user installable, it takes a gear
press to get them on.
 The slow speed
performance of BOTH trucks was better than before. It used to take 4
volts to get the motors to run and the slowest no load wheel speed was
about 6 rpm for the "good" truck and 10-12 rpm for the "bad" truck.
When the bricks were returned, both of them would run at about 1 volt
at about 4 rpm or less with a DC power source. When running from an MRC
Tech II power pack with back EMF control, the trucks would run steadily
at about 0.7 rpm (90 seconds/turn).
The slow speed
performance of BOTH trucks was better than before. It used to take 4
volts to get the motors to run and the slowest no load wheel speed was
about 6 rpm for the "good" truck and 10-12 rpm for the "bad" truck.
When the bricks were returned, both of them would run at about 1 volt
at about 4 rpm or less with a DC power source. When running from an MRC
Tech II power pack with back EMF control, the trucks would run steadily
at about 0.7 rpm (90 seconds/turn).
The reworked bricks also had the pads moved to one of the end
gearboxes of the brick. Because I had modified my housings, this move
slightly upset the wheel loading that I had adjusted before so I moved
them back to the center gearbox.
[ Top ]
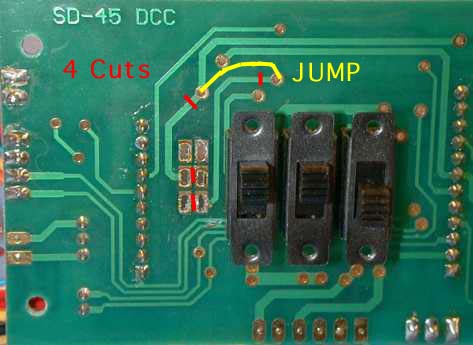
The SD45 has the most complicated internal wiring of any loco that
I've come across to date. This is the first large scale loco that I
have come across that comes prewired to accept DCC or R/C control
without having to tear into any existing wiring. There is one
complication for DCC installation though that needs to be fixed in some
future version of the main circuit board. I got around it with some
cuts and jumps.
The unit is designed to accept power either from the connectors
available at both ends or from the track. The connectors can be used to
bus multiple locos together to share power pickups or a battery trail
car, however a female to female adaptor connector (not supplied) will
be necessary to connect two locos with the supplied connectors. The
power switch on the loco either connects or disconnects the power
pickups to this bus. If you leave the power switch on while the loco is
connected to batteries in a trail car, the loco will backfeed power
back to the track which is undesirable.
I've converted the power connectors on this loco to my personal
standard DB-25 type Power
Connector Pins.
All the accessories in the loco (except the smoke) run from an
internal bus derived from a PWM power converter. This converter reaches
full output out with about 4 volts in so that the accessories are
nearly constant intensity. The headlights run from this internal bus
are returned directly to a rail through a diode. This is a fairly
common method of directional headlight control. If a DCC decoder is
used, then the lights will return through a DCC function output
instead. The blue wire output of a DCC decoder would not be used. The
Lamp On/Off switch disconnects all loads from this converter. The
headlight circuits draw about 40 mA average each.
The smoke unit runs at full rail voltage of either polarity or on
DCC track power and is connected through a power switch to the rail
inputs through a jumper on the jumper plug. One lead goes directly to a
rail so that the smoke unit should not controlled by a DCC decoder
function output unless it is rewired.
There is a bridge rectifier on the board that supplies DC power to
the PWM power converter. Both outputs of this bridge are available on
both the DCC and the accessory connectors. The DC voltage on these pins
will roughly equal the peak rail voltage.
There is a problem with this approach during integration with DCC.
The PWM power converter is on all the time so that the current that it
draws will confuse a DCC command station during decoder programming.
The command station assumes that ALL loads are disconnected or wired
through the decoder during programming. During programming, the command
station communicates with the decoder by the decoder drawing a pulse of
current for a affirmative answer to a query posed by the command
station. If there are parasitic loads, the command station cannot tell
when the decoder is answering. This will be a major problem when
programming on the programming track. Programming on the
main in OPS mode will still work but without read back of the actual CV values. The
lighting switch should be wired to disconnect the INPUT to the PWM
power converter instead of disconnecting the loads from its output as
designed. This requires some cuts and jumps to move the lighting switch
to its proper electrical location.
The motors are connected through a motor switch and the jumper plug
which comes installed in the "DCC" socket. A DCC decoder or R/C RX
could be substituted for this jumper plug so that no cutting or hacking
on the wiring is necessary to get the basic functionality of command
control. No one currently (Nov 2001) supplies anything that plugs right
in. The jumper plug is symmetrical, it can be plugged in either way.
The plug jumpers pins 1 through 4, pins 5 and 8, and pins 9 through 12.
Pin 1 of the DCC socket is furthest from the J1 designation.
A limited number of accessories are available for control at the DCC
connector. There are pins for power, the motors, the front headlights,
the rear headlights and the smoke system. There is no cross connect
between the DCC connector and the sound connector so sound function
control will have to be wired around the main circuit board.
There is a second connector on main board which is configured for
connection to an accessory system. It has a combination of sound and
power functions. The tables below lists the pinouts and functions of
each pin for both connectors. Again, pin 1 is furthest from the J2
designation.
SD45 DCC Connector Pinouts
| Pin Number |
Function |
Notes |
| 1 |
N/C |
Not Connected |
| 2 |
Pickup Right |
Battery/MU connectors always connected to this
pin |
| 3 |
Motor Right |
Usually jumped to the right rail pickup |
| 4 |
Front Lamp Control |
Usually jumped to the right rail pickup |
| 5 |
Power Pickup Right |
Feeds power to the smoke unit. Usually jumped to pin
8 |
| 6 |
Positive DC Voltage |
Rectified from track power |
| 7 |
GND |
Internal system ground, rectified from track
power |
| 8 |
Smoke Unit Power |
Usually jumped to pin 5. The other side of the smoke
unit is wired to the left pickups. |
| 9 |
Rear Lamp Control |
Usually jumped to the left rail pickups |
| 10 |
Motor Left |
Usually jumped to the left rail pickup |
| 11 |
N/C |
Not Connected |
| 12 |
Left Rail Pickup |
Battery/MU connectors always connected to this
pin |
SD45 Accessory Connector Pinouts
| Pin Number |
Function |
Notes |
| 1 |
Speaker |
Also available on Pin 3 of the speaker connector and a
pad at the board edge |
| 2 |
Speaker |
Also available on Pin 1 of the speaker connector and a
pad at the board edge |
| 3 |
Not determined |
Connects to pin 2 of the speaker connector |
| 4 |
Motor - |
Motor Power. Also available on pin 1 of the Sound
Power connector, would be used to power a sound system |
| 5 |
Motor + |
Motor Power. Also available on pin 2 of the Sound
Power connector, would be used to power a sound system |
| 6 |
Internal System Ground |
Same as Pin 7 on the DCC connector |
| 7 |
Internal System DC Bus |
Rectified track power, same as pin 6 on the DCC
connector |
| 8 |
Function Not Determined |
Connects to the motor when the motor switch is
off |
| 9 |
Function Not Determined |
Essentially in parallel with pin 8 |
| 10 |
N/C |
Not connected |
The following three diagrams are the complete schematic of the stock
SD45. These roughly follow Aristo's drawings dated March 9, 2000, but
some errors on those drawings have been corrected. The drawings are
given in three parts, the first one is the wiring in the shell, the
second is the wiring on the frame, and the third is the wiring of the
sound and accessory connector.
[ Top ]
 Except for the complication involving
decoder programming, DCC installation was straightforward. I elected to
install an NCE D408SR decoder because it is the only one that can
handle the average current of the SD45 at full lug. At the time, there were no plug and play decoders available that would handle the SD45. The newer Digitrax DG583AR is claimed to be designed to work with the SD45 but I have not evalutated it. The smaller DG383AR does work in a two motor loco. The DC resistance
of the motor used in the SD45 is 6.7 ohms minimum. This implies that
the stall current at 16 volts is 2.4 amps per motor. A DCC decoder will
see all 4 motors in parallel with a little series resistance in the
wiring from the DCC socket. The total stall current should be a little
under 10 amps which jives with the 8.8 amps that was actually
measured.
Except for the complication involving
decoder programming, DCC installation was straightforward. I elected to
install an NCE D408SR decoder because it is the only one that can
handle the average current of the SD45 at full lug. At the time, there were no plug and play decoders available that would handle the SD45. The newer Digitrax DG583AR is claimed to be designed to work with the SD45 but I have not evalutated it. The smaller DG383AR does work in a two motor loco. The DC resistance
of the motor used in the SD45 is 6.7 ohms minimum. This implies that
the stall current at 16 volts is 2.4 amps per motor. A DCC decoder will
see all 4 motors in parallel with a little series resistance in the
wiring from the DCC socket. The total stall current should be a little
under 10 amps which jives with the 8.8 amps that was actually
measured.
The decoder itself was just stuck to the inside wall of the shell
with double back tape. One of the blue wires (accessory power) was run
to the rear to power the rear LED headlights and the other goes forward
for the same purpose. The two sound trigger wires go back to a set of
optoisolators (see the section on sound installation below) to trigger
the horn and bell. All the other connections (track power, motor and
headlight controls) are wired through the DCC connector.
The connections to the DCC socket are listed in the table below. A
12 pin strip of single row 0.1" pin grid connector is an exact
substitute for the Aristo jumper plug.
DCC Decoder Connections
| Pin Number |
Decoder Wire Color |
Wire Function |
| 1 |
N/C |
No Connection |
| 2 |
Black |
Track Power |
| 3 |
Gray |
Motor |
| 4 |
White |
Front Headlight |
| 5 |
Jump to Pin 8 |
Smoke |
| 6 |
N/C |
No Connection |
| 7 |
N/C |
No Connection |
| 8 |
Jump to Pin 5 |
Smoke |
| 9 |
Yellow |
Rear Headlight |
| 10 |
Orange |
Motor |
| 11 |
N/C |
No Connection |
| 12 |
Red |
Track Power |
 The problem
with the lighting circuit mentioned in the section on wiring can be fixed with some cuts and jumps in two different ways.
The problem
with the lighting circuit mentioned in the section on wiring can be fixed with some cuts and jumps in two different ways.
One
fix is to disconnect all the traces from the lighting switch.
Then the same switch is rewired to break the connection between the DCC
connector and the rectifier diodes on the board. This is shown in this and the next photo. I elected to break
BOTH connections so I needed to cut the short traces between the pads
on the lighting switch too. Since I had already removed the switch to
be sure that I knew what I was doing, I was able to do this. If only
one side of the bridge connection is broken (the 2nd method shown in the schematic below), then these two short traces
don't need to be cut and only two wires need to be added. Getting the switch off is a difficult task and
consumes quite a bit of solder wick.
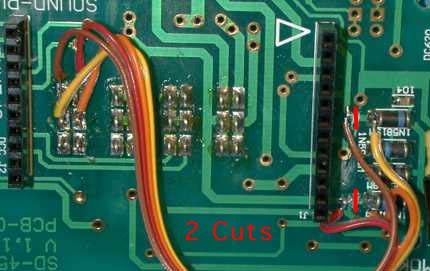 On the top side
of the board, the traces between the DCC connector and the diodes need
to be cut too for the first method. Then wires from the switch are wired back to the cuts to
switch one or both on or off. This fixes the decoder programming
function and leaves the lighting switch functioning essentially the
same.
On the top side
of the board, the traces between the DCC connector and the diodes need
to be cut too for the first method. Then wires from the switch are wired back to the cuts to
switch one or both on or off. This fixes the decoder programming
function and leaves the lighting switch functioning essentially the
same.
 This schematic shows the changes that need to be made for the 2nd method. This method does not require that the swtich be removed from the board to cut the traces underneath. Three cuts and jumps are necessary.
This schematic shows the changes that need to be made for the 2nd method. This method does not require that the swtich be removed from the board to cut the traces underneath. Three cuts and jumps are necessary.
If the modification isn't done, the PWM runs all the time and it makes programming a DCC decoder impossible on the programming track. The wiring is changed so that the switch controls the power at the bridge rectifier to completely disconnect all the accessory circuits. It also leaves all the loads connected to the PWM all the time. In effect, the switch does what it did before, it shuts all the loads down, but it does it at the input of the PWM instead of at the output.
[ Top ]
Sierra Sound Installation
I have elected to install a Soundtraxx Sierra sound system in the
SD45. There is an internal connector intended for installation of an
Aristo Digital sound system, but I have been pleased with the Sierra
and I will hack it in instead.
 The SD45
comes with a speaker preinstalled and prewired to the sound connector
but the acoustic mount of the speaker is less than adequate. A fairly
high power 8 ohm speaker is mounted directly under the radiator fans
projecting upward. This is good. However, the front of the speaker and
the back of the speaker are both exposed to the inside of the shell.
This is bad. The internal acoustic coupling will allow some of the
waves from the front of the speaker to interfere with the waves from
the back. This has the bad effect of reducing the volume emitted by the
speaker, especially at the low end of the audio spectrum. The low
frequency sounds provides the "guts" of the diesel engine sound and are
important.
The SD45
comes with a speaker preinstalled and prewired to the sound connector
but the acoustic mount of the speaker is less than adequate. A fairly
high power 8 ohm speaker is mounted directly under the radiator fans
projecting upward. This is good. However, the front of the speaker and
the back of the speaker are both exposed to the inside of the shell.
This is bad. The internal acoustic coupling will allow some of the
waves from the front of the speaker to interfere with the waves from
the back. This has the bad effect of reducing the volume emitted by the
speaker, especially at the low end of the audio spectrum. The low
frequency sounds provides the "guts" of the diesel engine sound and are
important.
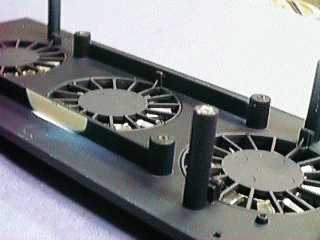 The
speaker is mounted on 4 posts on the radiator fan assembly. The
assembly itself is easily removed from the loco by removing four
screws. The sides of the speaker mount are partially blocked by plastic
ridges, but these don't extend high enough to reach the speaker seal.
The ends are entirely open.
The
speaker is mounted on 4 posts on the radiator fan assembly. The
assembly itself is easily removed from the loco by removing four
screws. The sides of the speaker mount are partially blocked by plastic
ridges, but these don't extend high enough to reach the speaker seal.
The ends are entirely open.
 There are lots
of ways to fix this problem, I choose this one. A set of walls made
from 0.125" x 0.250" styrene were assembled to enclose all three
radiator fans. A 0.030" strip was glued to the top of the existing
sidewall to seal against speaker. All these parts were attached with
Zap-a-Gap CA. All the joints between the pieces were filled with a
little more Zap-a-Gap CA. This method isolates the front of the speaker
from the back and allows the entire long hood to act as an enclosure
for the speaker. The sound is directed out all 3 radiator fans.
There are lots
of ways to fix this problem, I choose this one. A set of walls made
from 0.125" x 0.250" styrene were assembled to enclose all three
radiator fans. A 0.030" strip was glued to the top of the existing
sidewall to seal against speaker. All these parts were attached with
Zap-a-Gap CA. All the joints between the pieces were filled with a
little more Zap-a-Gap CA. This method isolates the front of the speaker
from the back and allows the entire long hood to act as an enclosure
for the speaker. The sound is directed out all 3 radiator fans.
 Then two covers
were made from 0.080" styrene sheet and glued over the top of the
walls. The covers fit tightly against the edges of the speaker. The
result of this modification was quite successful. The overall volume of the
sound system was at least doubled and the low end was significantly enhanced.
Then two covers
were made from 0.080" styrene sheet and glued over the top of the
walls. The covers fit tightly against the edges of the speaker. The
result of this modification was quite successful. The overall volume of the
sound system was at least doubled and the low end was significantly enhanced.
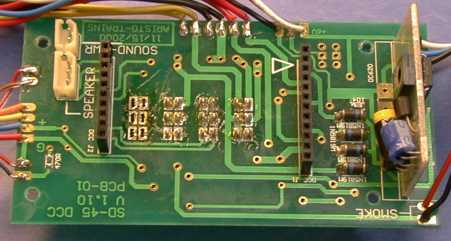 For those that
aren't using the Aristo sound system, the speaker terminals are
available as two solder pads on the edge of the main circuit board.
These pads are the two closest to the speaker connector. Check it by
using a ohmmeter set to the X1 range. When the pads are probed, the
speaker should click.
For those that
aren't using the Aristo sound system, the speaker terminals are
available as two solder pads on the edge of the main circuit board.
These pads are the two closest to the speaker connector. Check it by
using a ohmmeter set to the X1 range. When the pads are probed, the
speaker should click.
 The sound system
connector is also a standard 0.1" spacing pin grid header. These can be
purchased in lengths of 40 to 80 pins and simply cut to the desired
length. This same pin grid header is used for the DCC connector. This
particular version does not have captive pins as it is designed for the
short ends to be soldered into a circuit board to hold them in
position. The plastic header just provides support until the strip is
soldered. When wires are attached, the pins may move a little. A small
drop of superglue placed at the joint between the pin and the header
after soldering will hold it in place.
The sound system
connector is also a standard 0.1" spacing pin grid header. These can be
purchased in lengths of 40 to 80 pins and simply cut to the desired
length. This same pin grid header is used for the DCC connector. This
particular version does not have captive pins as it is designed for the
short ends to be soldered into a circuit board to hold them in
position. The plastic header just provides support until the strip is
soldered. When wires are attached, the pins may move a little. A small
drop of superglue placed at the joint between the pin and the header
after soldering will hold it in place.
The Sierra sound system installation to go along with DCC is a
little complicated by the peculiar characteristics of the Sierra. It
takes quite a bit of interface to get the Sierra to work properly with
a DCC decoder or the Aristo CRE-55490 on board R/C receivers. Other R/C
systems may be afflicted by the same difficulty. Regular track powered
installations won't need this interface. The schematic diagram of the
interface circuit and an operational description can be found on my Sierra Tips page.
 Due to the addition
of the interface circuit, the installation looks complicated but it
isn't really all that bad. The interface board is on the lower right,
the Sierra is at the lower left. Both boards are fastened to the shell
wall with double back foam tape. The Sierra battery is mounted with double
back tape to the speaker enclosure.
Due to the addition
of the interface circuit, the installation looks complicated but it
isn't really all that bad. The interface board is on the lower right,
the Sierra is at the lower left. Both boards are fastened to the shell
wall with double back foam tape. The Sierra battery is mounted with double
back tape to the speaker enclosure.
Note that the frame weight protrudes upward from the shell edge by
about 3/4" so that all the boards and parts have be mounted high enough
to clear it.
 The sound
power and volume/external programming switches are mounted under the
dynamic brake housing with the other switches. There isn't a lot of
vertical clearance so the switch handles had be trimmed short with a
pair of diagonal cutters so that they would clear the cover.
The sound
power and volume/external programming switches are mounted under the
dynamic brake housing with the other switches. There isn't a lot of
vertical clearance so the switch handles had be trimmed short with a
pair of diagonal cutters so that they would clear the cover.
 There were times that the Sierra sounded distorted with an irritating buzzing sound. I had assumed that the sound was coming from the fans but it was not. It turned out that the inner grills were buzzing. It wouldn't happen all the time and sometimes one or more of the six grills were causing the problem. Anyway, after poking around with a toothpick at full whistle I found the sensitive spots. A single drop of Zap-A-Gap CA applied with a toothpick at the bottom center of each grill would prevent the grills from buzzing. The glue is shiney in this photo because it hasn't dried yet. This was the last grill that I glued after determining that the patch worked on the more serious offenders.
There were times that the Sierra sounded distorted with an irritating buzzing sound. I had assumed that the sound was coming from the fans but it was not. It turned out that the inner grills were buzzing. It wouldn't happen all the time and sometimes one or more of the six grills were causing the problem. Anyway, after poking around with a toothpick at full whistle I found the sensitive spots. A single drop of Zap-A-Gap CA applied with a toothpick at the bottom center of each grill would prevent the grills from buzzing. The glue is shiney in this photo because it hasn't dried yet. This was the last grill that I glued after determining that the patch worked on the more serious offenders.
This page has been accessed  times since 28 Aug 01.
times since 28 Aug 01.
© 2001-2008 George Schreyer
Created Aug 28, 2001
Last Updated December 27, 2008
 27 Dec 08
27 Dec 08