 24 Dec 10 19 Oct 11
24 Dec 10 19 Oct 11In this page, I will provide an introduction to Digital Command Control as a system. At the end of this page, I've provided some information about my experience with one particular DCC system. I've concentrated on the information that isn't in the manual or isn't obvious without carefully studying the manuals.
I expect that this page will be a "living document" in that it'll grow as I find more information that might be useful to others.
It is pretty clear to me that none of the current DCC manufacturers (LGB included) have a clue as to what it takes to make DCC work properly out of doors even though several offer products that are claimed to be for "large scale." For the most part, they seem to think that systems optimized for indoor use will be directly transferable to out of doors. Not so. Since the "right" gear isn't available now, I will offer my concept of what a reliable and flexible DCC system should be so that it will work well in an outdoor environment.
24 Dec 10 19 Oct 11The majority of the methods that are in use to control model trains fall into two general categories. These are called cab control and command control.
Cab Control is the most common system and conceptually the most simple even though there are incredibly complex implementations out there. Your typical starter set with a power pack and a circle of track is cab control in its least complicated form.
Cab control simply means that one or more power packs of some kind are used to control one or more sections of track. All the engines on a particular section of track are controlled together by the power pack, or cab, that is currently connected to that section. Often an elaborate switching system is wired to sequentially route power to sections of track such that an individual train remains controlled by a single power pack as it traverses many sections of track.
Cab control has the advantage of simplicity and low cost. No fancy electronics are necessary to make it work. No modifications to locomotives are required. Troubleshooting is relatively easy.
Cab control has two serious disadvantages. One is that different trains on a single section of track respond to the same commands. This severely limits operational flexibility. The second is that the methods that are used to switch control between track sections usually require a lot of manual intervention in the form of flipping switches. This can get to be a real drag and can seriously detract from the enjoyment of running trains.
Command Control gets around these two problems through circuitry that allows engine control commands to be sent directly to an engine (or group of engines in an MU consist) independently of all other engines. There are many implementations of command control, many involve direct radio control of a track powered, live steam, or battery powered locomotives. Others transmit commands to a locomotive via the track itself in one of several different formats. Command control allows each locomotive to be run all over a layout without worrying about flipping cab switches. Individual trains can run at different speeds or even different directions anywhere on the layout without regard to other trains (cornfield meets notwithstanding).
One common feature of command control is that each engine carries some form of command receiver that controls the motor (or throttle in the case of live steam) of a locomotive in response to commands directed to that particular locomotive. This adds a level of electronics complexity not usually found in cab control.
[ Top ]
Even though command control and its components are usually fairly complex, it offers operational advantages that are hard or impossible to achieve with cab control. Also, for those of us that are technically inclined, it has great toy value. Even though the systems are electronically complex, the various manufacturers have done a credible job of making their systems installable and usable by even those individuals who consider themselves "technically challenged."
Command control combined with battery power (there are battery powered trains with nothing more than a power switch) allows a degree of freedom not possible with any kind of track powered trains. It allows the trains to operate on less expensive track that never needs cleaning. In some areas of the country, track contamination is such a serious problem that track powered trains are nearly impractical.
Battery power carries a couple of liabilities, and they may be considered serious by some. First, a fairly large battery is required. It can be carried inside some engines, but others require that the battery be carried in a trail car. Batteries have a limited energy storage capability and must be recharged. Typical battery run times vary and can range from less than an hour to several hours. Batteries don't last forever and need to be replaced occasionally. Multiple unit control is a problem as it is difficult to control multiple engines together to make them share the load properly. Some may consider this to be a realistic operating challenge to be met because that is the way it was done with real steam engines.
Overall, battery power with some form of command control can be considered a very successful system. It has proven itself well and operators that have converted to battery power seem ill inclined to convert back.
Track powered command control also has advantages and its own liabilities. With track power available, locomotives can run continuously with long, heavy trains and with all manner of power hungry accessories running and never run down. With some track power command control systems, multiple unit control is implemented easily and effectively. In this case it works much the same as prototype MU diesel control. The engineer has all the locomotives under the control of his throttle. Speed control and power sharing between the locomotives is handled automatically.
Track power still requires that the track be in good condition and at least reasonably clean or it just won't work. In some areas of the country, track cleaning seems to be a minor problem and track powered systems work quite well.
With either battery powered command control or track powered command control, operability of trains is materially improved. I feel that this improved performance is worth the cost and hassle of implementing command control of some kind. Which kind would work best for you will depend mostly on which of the downside issues bother you most.
[ Top ]
One method of command control is to use one of the several proprietary radio command control systems available. Each of these systems has addressed a particular set of user needs and each seems to work as they have all been successful in the market and their users tend to proclaim their features. All of these systems provide control ranges of 50 to 100 feet or so.
Each of these systems is self contained and completely captive to a particular manufacturer. Each system is totally incompatible with all of the other systems except for different systems can run on the same track at the same time. Each of these systems is also currently incompatible with DCC except that some of them will accept the DCC track signal as a source of power.
There are infrared control systems available as well, but IR tends not to work so well out of doors due to interference from a relatively larger IR source in the sky.
More information on each system can be found at the manufacturer's web sites. These sites can be accessed with the links at the beginning of each paragraph.
The Train Engineer by AristoCraft operates at 27 MHz and allows on board battery power, constant track power, or regular track powered operation. The system is relatively inexpensive. It has a 10 amp capacity for regular track power and 2.5 amp capacity for on board power. The system includes accessory receivers and adapters that can be used to operate onboard or stationary accessories. Onboard receivers will accept DCC for power so that the TE and DCC can coexist to some extent. The system is designed to allow a small number of transmitters to address a large number of receivers. Each transmitter can easily address 2 or 10 (depending on the version) different receivers. 20 or 100 different receivers can be addressed with somewhat more difficulty.
Locolinc by Keithco operates at 75 MHz. This system allows on board battery, constant track power, or battery backup constant track power operation. Accessory control is available for both on board and stationary accessories. Locolinc is probably the most elaborate and expandable proprietary command control system. It also tends to be the most expensive. The Locolinc system can address 64 different receivers.
RCS offers a 27 MHz radio command control system that can operate from batteries, constant track power or a trackside receiver can be used for conventional track power. The RCS transmitter is easily the smallest of the bunch and fits easily into a shirt pocket. The RCS system allows accessory controls. The system is designed for dedicated operation, one transmitter is usually paired with one receiver. 96 pairs are allowed.
Reed's Hobbies Instant R/C is another 75 MHz system that uses inexpensive AM type radios for control. This system is usually configured for battery power only. It allows limited control of onboard accessories and usually requires one transmitter per receiver. This system may not be available anymore.
The key thing to remember about these systems is that they are proprietary. The components for these systems are available only from their manufacturer (with the exception of Reed's transmitters) so that if the manufacturer goes out of business, chooses to stop manufacturing the system or chooses to stop expanding the system, you won't be able to expand further without buying bits and pieces on the used market. This last statement leads into the discussion of a nonproprietary command control system which is generally called DCC.
[ Top ]
The specific subject of this page is a particular form of track powered command control called NMRA compliant Digital Command Control, or DCC. There exist several formats of digital command control that are mutually incompatible. The NMRA version is just one of those formats. It is probably the best one.
The NMRA accepted format for DCC was originally developed by Lenz. This system was recognized as technically superior to the other systems that were available and with the agreement of Lenz, this format was used as the basis for the NMRA standard.
Without going into the techno-political issues, the standard was defined only for the interface between the two major parts of the DCC system. The NMRA standard defines only the format of the signal that is applied to the track. An NMRA compliant DCC command station generates a signal that can be properly read and interpreted by an NMRA compliant DCC decoder. The decoder is the device that rides in the locomotive and directly controls the motor. The command station is the part that interfaces with the operator and sends power and commands to the decoders via the track.
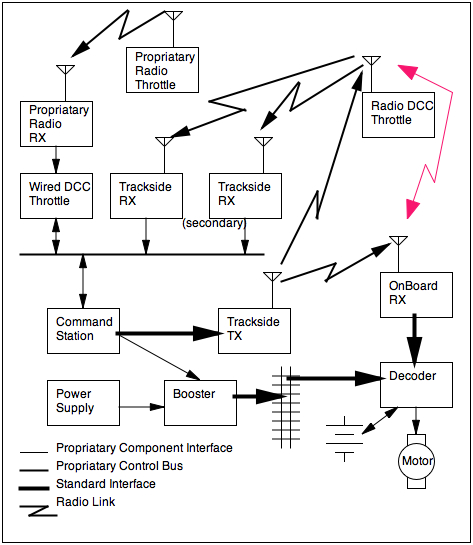
 This is a diagram of a typical DCC system. The user operates the system with a device called a throttle. The throttle has at least speed and direction controls, but it can be covered with multifunction buttons and displays. The operation of the system is coordinated by the command station. The command station collects all the control inputs from all of the throttles and formats the data into a single command stream. This formatted signal is sent to a booster which combines the command signals and raw power from a transformer or power supply to make the NMRA compliant DCC signal which is then applied to the track.
This is a diagram of a typical DCC system. The user operates the system with a device called a throttle. The throttle has at least speed and direction controls, but it can be covered with multifunction buttons and displays. The operation of the system is coordinated by the command station. The command station collects all the control inputs from all of the throttles and formats the data into a single command stream. This formatted signal is sent to a booster which combines the command signals and raw power from a transformer or power supply to make the NMRA compliant DCC signal which is then applied to the track.
 The decoder riding in the locomotive receives the combined power and command signals and separates them again. The command signal is interpreted to determine what the command was. The power signal is used to provide power to the decoder microprocessor, motor control and accessory control circuits. If the command was to change the motor speed, the decoder changes to the power applied to the motor. If the command was to activate an accessory, the appropriate accessory function is activated.
The decoder riding in the locomotive receives the combined power and command signals and separates them again. The command signal is interpreted to determine what the command was. The power signal is used to provide power to the decoder microprocessor, motor control and accessory control circuits. If the command was to change the motor speed, the decoder changes to the power applied to the motor. If the command was to activate an accessory, the appropriate accessory function is activated.
The command station formats command information into "packets." Each packet is 3 to 5 bytes of information containing a synchronization code, the address of the decoder that the packet is intended for, the actual command information and an error detection code. Each decoder in the system hears all the packets but will only operate on packets specifically addressed to it. If a packet is garbled, perhaps due to loss of power contact at the wheels, the error check code will fail and indicate that the packet is incomplete. The whole packet will then be rejected. The command station usually has no way to know if any given packet got through, so it continually resends active commands in the order of their importance. Commands that have recently changed are resent more often, older commands are refreshed less often. In any event, the command station is continually sending packets, even if they are repeats, such that any packet that is missed for any reason will eventually get through. Although the packet transmission rate is variable, the rate is usually around 200 packets per second.
The signal on the track is really an AC voltage, although the wave form is squared off and the period of the cycles is not constant. Short cycles are "1" bits, longer cycles are "0" bits. This AC voltage contains both the power and the control signal. The decoders rectify this power back to DC for their internal use. Since the AC power is on the track all the time, track powered accessories such as smoke and lights operate constantly, it does not matter if the engine is moving or not.
It is possible to operate ONE regular track powered engine on some DCC systems. A kludge called "zero stretching" is used to make the normally symmetrical DCC signal somewhat asymmetrical such that there is a net DC component along with the AC signal. A DC motor will respond to this and move. However the AC signal is still there and some AC current will flow in the motors. AC is hard on DC motors, they will run hotter than with pure DC and in some cases, the AC signal can weaken the permanent magnets in the motors. Most motors will buzz and hum under these conditions, indicating that they don't much like it. Some types of motors, especially "coreless" motors (like in the LGB Chloe), do not tolerate AC at all and will promptly burn up.
Since a DCC system is track powered, the problems that involve reversing with regular track power still exist. However, DCC systems have the capability of automatically handing the incompatibility. This can either be done with intelligent boosters or autoreversing control modules. One intelligent booster or reversing module can handle all the reversing sections of a layout, as long as ONLY one train at a time is crossing a boundary between the main track and the reversing section.
[ Top ]
The currently available DCC systems were primarily developed for indoor, smaller scale trains. Only recently some manufacturers began offering capabilities aimed at large scale trains.
These are some of the issues that I see that must be addressed with DCC and Large Scale Trains.
Cost. Getting a DCC system going requires a fairly substantial up-front capital investment. $500 or more is usually required to get the first engine going under DCC. Incremental costs of adding additional engines is lower than with radio control as the decoders are less expensive than radio receivers and there are no additional costs for batteries or extra transmitters. A typical large scale decoder runs $30 to $80 when discounted. If several heavy trains are run such that the total current load goes beyond 8 or 10 amps, then additional boosters and their associated power supplies will be required at maybe $200 to $300 for the pair. The track, and therefore the current load, is divided up between the boosters with engines able to traverse between sections powered by different boosters without difficulties. Radio gear adds even more to the cost at $200 to $500 (depending on the manufacturer) for the first link and incrementally less for additional links. You could be looking at $2000 or more to complete a DCC conversion for a medium to large outdoor layout.
Decoder Sizing. Large scale trains typically consume much more power than HO trains. High current decoders are now being offered by several manufacturers. A two motor diesel can easily draw 3 to 5 amps under heavy load and 10 amps or more if stalled. Actual stalling isn't really likely as our engines usually slip long before they stall, still starting a heavy train can produce stall like conditions for a second or two. See my Tractive Effort Tests page for some actual stall current test data on complete locomotives and some test data on individual motor stall currents.
Note that most manufacturers rate the current capability of the decoder based on TOTAL current consumption. This includes the current drawn by any activated accessory functions. If you have an amp worth of functions running, there is one amp less available to the motor. I typically do not wire high current functions, such as smoke, through the decoder. In the cases where I do, I use a small relay so that the decoder sees only the relay coil current.
Decoder Thermal Issues. DCC decoders have some voltage drop, usually about 2 volts. This voltage drop is mostly dependent on forward diode drops, so it is pretty much independent of current or decoder size. When current is drawn through this drop, heat is dissipated. A 5 amp decoder will dissipate something like 10 watts at full load. Without some form of heat sinking, the decoder will heat rapidly and either shutdown or fail.
Some decoders come with a heat sink attached and even these get pretty hot at full load. Others (up to a rated 3 amps) come with no heat sink at all and I don't know how they even survive. The "5 amp" decoders that I initially used have an external bridge rectifier component (the part that gets the hottest) which MUST be heat sunk by the user. At a couple of amps a small TO-220 type heat sink will keep its temperature under some sort of control. To get near the rated current, the decoders must be attached to a large heat sink AND that heat sink must have some method of shedding the heat to the air. Since most decoders and their heat sinks are bottled up inside a loco shell, this can be a real problem. If you plan to run a decoder at more than 2 amps, the FIRST thing you must do is figure out how you are going to cool the thing. You may need to mount the decoder externally so that the heat sink can see moving air, or ventilate the shell to allow air to circulate as the engine moves. A small fan may be required in some cases. Tiny 5 and 12 volt fans are available to cool many of the new high speed microprocessors found in late model personal computers.
Decoder Output Format. The signal format that the decoder applies to the motor is another feature that is NOT controlled by any sort of standard. It is entirely up to the decoder manufacturer to determine what his decoder will do to your motor. Most decoders output a PWM (Pulse Width Modulation) wave form to the motor. This is just a full voltage pulse that increases in width with increasing speed. This is done because its an easy and efficient wave form to generate in a small decoder. The pulse repetition rate is usually between 80 and 300 Hz, so you can hear each pulse hammering on your motors, especially at low speeds.
When the motors are stopped and the initial short pulses are applied, the current drawn by the motors during the pulses is the stall current of the loco. The motors can handle these currents because they occur only for a short time resulting in a much lower average current. The semiconductor switches in the decoders are much more sensitive to the high current pulses than motors and, if overloaded, could fail on the first pulse. This is why it is important to use a decoder sized to the motor stall current. If the decoder limits the peak current applied to a motor to values that are too low, the motor can not develop the torque it needs to get started and it may be unable to accelerate. As the motors pick up speed, the peak currents will decrease.
Some decoders can drive user installed filtering components that smooth out the pulses generated by the H-bridge in the decoder into a DC-like signal. This is easier on the motors, but the components that do the filtering are much larger than the decoder itself.
Some newer "silent" decoders use PWM but at 16 kHz or higher. These very short pulses act like PWC and do not beat up on the motors as hard as the low frequency pulses. The decoders are called silent because most people cannot hear 16 kHz. I can, and it drives me nuts. If you can hear the raster scan of a TV set, you might not like a 16 kHz silent decoder because some motors may emit enough sonic energy to be audible to some people. The pulse repetition frequency must be above 20 kHz before most people cannot hear it any longer. Sometimes, a motor will be especially sensitive to a particular pulse repetition frequency and emit sound strongly. Most of the "silent" decoders allow the pulse frequency to be adjusted so that you can find a frequency that generates minimum acoustic noise.
Booster Sizing. The DCC booster supplies the power to run the trains. However, since the booster is running a whole layout it has to supply the current for many trains, not just one. Therefore, the booster current rating is critically important, more so than a power pack rating.
In the small scale world, an engine might draw a half an amp. A typical 5 amp booster can supply 10 engines. Large scale currents are typically much higher. Single engines can draw 2 or more amps under load. For example, two Aristo FA's pulling just 4 streamliners (with their lighting running off the track too at over half an amp per car) draws about 5 amps just for the one train, and that is with the smoke off. This is a problem.
When an HO layout gets too big for one booster to handle, the usual solution is to add another booster and divide the layout into two power districts with one booster running each half. The layout and therefore the load of the trains is divided up between the boosters. Since it is unlikely that all the trains will migrate to one power district at one time the booster load currents tend to share well.
When a single train can draw more than half the capability of a booster, just dividing up a layout into power districts doesn't help much. It could be expected that if only two high current trains were running, they could both easily run in the same power district at some time or other. The booster would become displeased and shut down. This makes booster sizing very important for large scale. The simple rule is "get the biggest booster you can get." Large boosters usually come in 8 or 10 amps. I started with an "8 amp" booster which I doubt works much beyond 5 amps. 4 engines and some lighted cars will shut it down when both trains are running on a grade. I have not been able to get three power hungry trains running at once yet without killing off this booster.
The booster needs a power supply with sufficient current capability such that the power supply itself doesn't sag much under load. If the power supply current limits BEFORE the booster does, then the booster will not be able to source enough current so that it can reach it's shutdown trip point and protect itself by shutting down promptly. Undersizing the power supply can result in a fried booster.
High current boosters do not come without risk however. The more current a booster can source, the more damage that it can do in the event of a fault. If a train derails and "shorts" out the track, the current supplied by the booster will increase. If the increase is high enough such that the booster detects that something is wrong, it'll automatically shut down to protect itself and your equipment. The bigger a booster is, the higher its shutdown current will be and the more likely it will be that "shorts" can occur that DO NOT draw enough current to shut down the booster. If high current is allowed to flow in the power contacts of a derailed engine for very long, the contacts can burn up or melt out of their plastic holders.
The old 8 amp Digitrax DCS100 command station/booster actually trips at about 7 amps RMS at the rails as measured with a 20 amp true RMS current meter. I built a ladder of 0.5 ohm 20 watt resistors to put in series with the meter and decreased the resistance a half ohm at a time until the booster just barely did not trip. It would sustain 6.8 amps but the waveform, as observed on an oscilloscope, was highly distorted with heavily rounded transitions. This booster doesn't have the capability to run two heavy trains without tripping so it really is not very usable under my, rather heavy, load conditions.
Eventually, I stopped using that booster and substituted and NCE PB110 10 amp booster. The DCS100 runs from the AC output of a Bachmann power pack which is fine because it doesn't drive any rails. The NCE runs from a 22 VAC, 15 amp transformer that is actually good for more than 20 amps by test. The transformer and PB110 booster together does indeed drive the whole railroad. The problem is that the trip current of this combination is somewhere between 19.5 and 20 amps. Even at those currents, the waveform of the booster is still reasonable even though the output voltage drags down some. There are several places on my layout, far from track feeders, where a dead short across the rails DOES NOT trip this booster. This is a problem. I sometimes get a derailment where I can hear the short "singing" which indicates that the booster has not tripped. I have yet to actually burn anything up under this condition, but I have been lucky.
I should beef up the feeders connected at more spots, but this is probably not the correct solution in the long run although I should do it anyway. Trying to get a reliable trip at all points on the layout at 20 amps is just asking a little much. I don't need these super high current levels, an 8 to 10 amp trip would do fine. I could buy more boosters and divide the layout into districts, but this is actually a pretty expensive option. Further, the Digitrax booster doesn't have enough smoke and the PB110 has too much. Since I've got all the power that I need and it's already distributed into blocks fairly well, what I should do is buy some electronic circuit breakers (DCC Specialists makes some good ones) and use those following the large booster to make up power districts. Circuit breakers are about $30 each.
Track Wiring. If an outdoor layout is wired to accept regular track power already and works OK that way, then adding DCC to the layout may be as simple as disconnecting the existing power pack and hooking the wires to a DCC booster.
In the HO world, the DCC manufacturers recommend that track feeders be connected between a 14 GA power bus to the track every 10 feet or so. They carry this recommendation over to large scale without thinking about the differences. Our rails are MUCH heavier than a 14 GA wire so our track works fine as the power bus itself. The fact that code 332 brass rail has 10 times the cross section as code 100 rail and that brass has about 6 times the conductivity of nickel silver means that the HO recommendation of 10 feet in HO becomes 600 feet in large scale. However since our single train currents are several times higher than HO, the reasonable distance between feeders shrinks back to maybe 100 feet. Distances of 200 or 300 feet, by the way, works fine with regular track power but may limit the fault current for a DCC booster. This assumes of course that the rail joints are properly conditioned, either by soldered jumpers, screwed joints or rail clamps.
Track Condition. For any track powered system, the track must be reasonably clean so some level of track cleaning will be required at some interval. Just running a track cleaning car for awhile may be enough in many cases. Sometimes stronger measures may be required. In any case DCC seems to work no better than PWC track power and somewhat better than linear track power at low speeds. At higher speeds, all three systems seem to work about the same in terms of the reliability of engine performance. Do not expect DCC to provide you any relief from track cleaning.
Walk Around Control. Up until just recently, all DCC systems were tethered. This is not a big deal on an indoor layout. Most of the systems allow a throttle to be unplugged while a train is running and then plugged again in somewhere else down the line. Aside from getting tangled in someone else's coily cord, this is not a big problem.
Outdoors, tethers are totally impractical. Dragging a tether across the yard, getting it tangled in bushes, knocking over ground level scenery or trains and tripping other people just doesn't cut it.
A radio equipped throttle is the only way to go. In this case, the radio control throttle communicates with the command station, not directly with the engine. Full radio control of a DCC system requires a two way radio link to do some functions such as releasing or taking control of an engine. Two way radio links are expensive so some of the current systems are one-way. This allows a train to be controlled remotely, but the throttle must be plugged in to select or deselect an engine.
DCC systems shouldn't require that crystals be changed, transmitters be reprogrammed or receivers be relinked to share a single radio throttle between all the engines on the layout. The only thing that needs to be changed to control a different locomotive is to select the unique address of that locomotive. Some systems work this way. Some systems will allow multiple transmitters to share a single receiver. Some can also automatically use multiple receivers to allow overlapped coverage areas.
The radio link to a DCC command station is NOT controlled by any form of publicly established standard. One manufacturer's radios will usually not work with another manufacturer's radios.
Accessory Control. Most larger DCC decoders have multiple accessory function controls. These are just switches that are controlled from the throttle. They can be used to control lights, smoke, and sound. Some of the decoders include special lighting effects to simulate flashing beacons, Mars lights or Gyralites.
Sound control is a special issue for large scale as most of the common sound systems were not intended to be controlled by a DCC decoder. In the HO world, it hasn't been a big problem as most HO engines don't have sound anyway. HO DCC users that want sound simply buy a "sound decoder" that has both motor controls and a sound system on it already. Sound decoders are not yet available at the higher current levels needed for large scale trains.
Remote control of the sound effects of large scale sound systems sometimes requires a little custom circuitry. Examples of these can be found in my Atlantic Tips page for the simplest case. A more complicated case is described in my RS-3 Tips page.
Decoder Installation. Conversion to DCC requires that a decoder be installed in each locomotive. Conceptually, the installation is not difficult, but in practice it can get quite involved. Difficulties usually result from locomotives that are hard to disassemble. Unlike N and some HO scale locos, large scale locos are usually large enough so that room can be found for the decoder without hacking away at the engine structure. Some rewiring is usually required because few large scale locos are prewired with DCC installation in mind. This might change with time as it has in HO.
You can figure that installation of DCC will absolutely void the locomotive manufacturer's warranty. You'll have to get in there and modify the wiring. LGB recommends, in fact they nearly demand, that engines be sent back to them for DCC installation, of course with an LGB supplied decoder. I would hold off on DCC installation until you are pretty sure that a particular engine won't need warranty service.
Decoder Programming. Most decoders will work right out of the box. However, if you use more than one, you'll have to at least change the address of any new decoder. This is done by programming the decoder with a programming function built into your throttle and command station. Unless you read the fine print in the instructions, you might run into a little difficulty. Command stations need to sense the current that a decoder draws to properly read back data from the decoder. This means that if there are any static loads wired to the track while decoder programming is attempted, those loads may interfere with programming. When you install your decoders, it is important to wire ALL the parts of your loco that draw any current at all either to the function outputs of the decoder OR provide a switch to allow the loads to be disconnected during programming.
Fixed Accessory Control. Most DCC manufacturers provide a capability for controlling fixed accessories, such as turnouts. Usually a stationary decoder is capable of controlling several devices. These decoders are intended to be connected directly to the track in the vicinity of the controlled devices. Power and control signals are derived directly from the track. Some systems allow groups of accessories to be defined such that the groups are all commanded together so that routes through many turnouts can commanded at once.
While this greatly simplifies wiring on an indoor layout as all the necessary wiring is local to a small area, it is not entirely practical on a large scale layout as the devices are not designed to deal with the outdoor environment. To use them on an outdoor layout, the stationary decoders need to be installed in a protected environment and wires then run out to the turnout motors. The wiring complexity is then similar to that needed to drive the turnouts from a conventional control panel.
Further, to flip an individual turnout with a DCC throttle is usually a pretty involved process. Often a mode is set by pressing a button on the throttle, then a code number for the turnout is selected by turning a knob or repeatedly pressing buttons, then another button needs to be pressed to actually flip the turnout. Overall, it is much too complicated. The interlocking route control system that I implemented with a proprietary R/C system works MUCH better. However, I have also interfaced stationary decoders with the pre-existing interlocking route control system and it works well too because I only select routes, not individual turnouts.
Computer Control. DCC provides the infrastructure to allow complete computer control of a layout. Some DCC systems include feedback mechanisms that allow a computer to read back train locations and other data so that fully automated or just computer assisted operation is possible. I don't see this as a very valuable feature for out of doors use because I don't want to carry a computer around with me and I don't do automated operations. However, for those so inclined, computer control can add another dimension to train operations.
Computers can be of assistance during decoder programming. See JMRI Tips for some information on a free, multi-platform computer interface for DCC.
Locomotive Performance. After I had converted a bunch of large scale and HO scale locos to DCC the locos and watched them for years, I did conclude that the poorest runners tended to work better on DCC than DC. The issue is the motor brushes, and to a lesser extent, the power pickup. In locos that have poor brushes (typically open frame HO motors) or contacts, the problems that the locos had is usually not an actual open circuit, but variable resistance in the contact. This produces unsteady operation especially at low speeds. DCC puts high voltage on the track and also places high voltage pulses on the motors. This makes the impact of variable resistance less significant at slow speeds where, on DC, the track and motor voltage would be low. Further, in the case of motor brush resistance, the back EMF (BEMF) capability of some better decoders can sense the motor speed and compensate the pulse width of the motor drive to partially overcome an increase in brush resistance. My 50 year old rubber drive Athearn locos presented a striking difference in overall performance when converted from a non-BEMF DH123 decoder (which in itself was much better than DC) to a similar but BEMF equipped DH163 decoder. With the BEMF decoder, they either run or they don't. When they don't, a drop of "conductive" oil on the commutator of the motor will bring them immediately back to life.
If a loco has mechanical problems, DCC generally won't help and sometimes makes the problem worse.
[ Top ]
DC motors have a characteristic called "stall current" that is particularly important in selecting a decoder (or R/C receiver for that matter) to control them. You can read more about stall current at my Small DC Motor Tips page. Simply put, stall current is the current drawn by a motor when it is not turning. The stall current is controlled by the DC resistance of the winding and brushes in the motor and the applied voltage.
DC motors are not designed to be stalled for any significant period of time. The stall current is usually high enough so that if a motor is stalled at normal operating voltages it can be expected to burn up in short order. However, stall currents for a short period of time are a normal part of motor operation. Every time power is applied to a motor that is not turning, it will draw a high pulse of current until it speeds up. The current will rapidly increase to the stall current value at the first application of voltage and then decay to the normal operating current as the motor reaches operating speed.
Stall current is a function of the stall resistance and the applied voltage. Running a motor at a voltage that is so low that the motor does not turn will result in a "stall" but the value of the current will be low enough, due to the low applied voltage, that the motor can handle the dissipation and it'll just sit there getting warm but not be damaged. This is the typical operation mode with a DC power pack. The first voltage a motor sees is relatively low and it starts turning somewhat gently. The current never gets very high as the motor is usually given a chance to speed up as the voltage is increasing.
Most DCC decoders and R/C receivers use some form of PWM (Pulse Width Modulation) to control a motor. The voltage applied to the motor is either near zero or at some relatively high value (usually 16 volts or higher for large scale applications). The longer the pulse, the more power the motor gets. The result is a little more violent than with a DC power supply. When a motor is first started up, a full voltage pulse is applied to the motor and the current can be quite high until either the motor picks up speed or the pulse stops. The second pulse will do the same thing, but if the motor has started turning as a result of the first pulse, the peak current will be a little lower. This goes on for each pulse until the motor reaches operating speed. Instead of generating torque smoothly and continuously as with DC power, the motor generates pulses of torque. During each pulse the motor draws higher peak current and makes more peak torque than it would with low voltage DC power. The torque and the current average out over time to roughly the same values as with DC power. If the pulse repetition frequency is high enough, the motor's physical and thermal mass smooths out both the motor temperature and net output torque. If the pulse repetition frequency is not sufficiently high, the motor will buzz annoyingly but it will still work ok.
These high peak currents can be hard on the power pickups and wheels. The very high currents may cause micro-arcing, welding and pitting of the wheels to a greater extent that DC power does.
High motor stall currents can also be hard on the motor controller. Whatever current the motor draws has to be supplied by the controller. If it is not designed to handle the load, the controller will overheat and maybe burn up. Since the thermal time constants of semiconductor devices are very short, it is conceivable that the motor controller switching devices could burn up during the first pulse of power if the controller is not properly designed and protected.
A good motor controller is designed to limit its output current for self protection. If this current level is less than the stall current of the motors that it is driving, then the motors will not be able to generate their maximum possible torque making it more likely that the motor will lug down or actually stall. This is a very bad condition for both the motor and the controller. The motor may not make enough power to run properly and slow down. This may be detected by the operator. The first response would be to turn up the juice, thereby making the problem even worse as the motor is already struggling. If the motor controller has back-EMF control, the controller will automatically increase the pulse width in a futile attempt to increase the motor speed. The inefficient condition that results will cause both the motor and the controller to overheat, with the possible demise of one or both of them likely.
The motor controller MUST be able to provide enough peak current for the motor to generate enough torque to run properly. If it can't, one or both could be damaged and the locomotive just won't run very well or for very long.
It is therefore important to properly match the motor stall current at the expected peak operating voltage to the motor controller's capability. Stall current is usually measured by applying a fixed DC voltage to a piece of track and then physically stalling a locomotive by pressing it down on the track while measuring the current. This test is hard on the loco, but a good one can handle it for a couple of seconds. There is a risk of breakage, either due to the physical force necessary or due to stripped gears. Further, the value of stall current measured is only a lower bound. The parasitic resistance of the test wiring, power pickups, and internal locomotive wiring will tend to make the measured current read lower than the real stall current of the motors. When a DCC decoder is wired directly to a motor(s), most of this parasitic resistance is no longer in series with the motor. The actual stall current of a motor by itself might be twice as high as the value measured on a whole locomotive.
In order to evaluate stall current, a voltage level must be picked. For large scale applications, 16 volts seems about right. After the voltage drop of the track, power pickups, internal wiring, and decoder drops, 16 volts is typically what is left over and available to apply to a motor. Further, the actual test does not have to be done at any particular voltage. Since the actual characteristic of a stalled motor is that of a resistor, the stall current can be measured at a lower voltage and then the stall current at any other applied voltage can be easily calculated. If the loco is measured at half voltage, the stall current at the lower voltage will be half. Measurements at lower voltages put less stress on the motors being measured and result in less risk to the motors and can produce the same data.
Stall currents measured this way will vary somewhat depending on the position of the motor armature. As the commutator moves under the brushes, the parasitic resistance of the brushes will change causing current changes of maybe 20%. Also depending on the brush design, there may be some positions that energize different numbers of internal windings. The stall current should be checked at various rotational positions and the largest value should be used.
SInce stall current is based on the DC resistance of a stalled motor, the stall resistance can be measured directly with an ohmmeter of sufficient accuracy at values between 1 and 10 ohms. Simply place the meter leads across the disconnected motor and manually twist the shaft. Look for the lowest reading and you have a good approximation of stall resistance. Check you meter before hand with the probes shorted to see what it reads with a zero ohm load then subtract this value from what you see. SOME motors MAY have intermittent commutator shorts and you MIGHT see this as a very low and poorly repeatable reading at some armature positions. These motors are bad and should be replaced. If you measure motor current with a oscilloscope and a current shunt, you may see commutator shorts as current spikes as the motors run. A good motor will not spike.
I went to the trouble to run these tests because I was having a problem finding a DCC decoder to install in a USA Trains GP-9. My measurements of the loco stall current were much higher than other locos, over 10 amps, and none of the DCC decoder manufacturers recommended that I install their decoder in this loco. They each politely recommended that if it wasn't too much trouble that I use somebody else's decoder. They were just having too many problem with warranty returns from others that had already tried it. I had made a quick check of the actual motor stall current of a motor in my GP-9 and I came up with a little more than 1 ohm of motor stall resistance. This results in a stall current of 15 Amps PER MOTOR at 16 VDC. The strongest DCC decoder available at the time that I got the GP9 was the NCE D408 and it was rated at 11 amps. I would need two, and even then, I would be beating up on the decoders. As of September 2002, NCE has released the D808 which is specifically sized to handle the USA Trains Locos.
This loco seemed to draw MUCH more current than any other that I had. When I inquired at USA Trains, they simply said that it wasn't true and their locos were not current hogs. Since this was one of the first ones, I figured that I got a lemon with some odd motors and continued to run the loco on straight track power. The trackside Train Engineer seemed to be able to handle it even though the stock plating on the USA wheels could not. It literally burned off in short order. The wheels have since been changed to CRES wheels from NWSL, see my GP-7/9 Tips page for more details on the wheels.
After discussing motor ratings with Tony Walsham of RCS, he offered up a set of motors that came out of an F3B that had been converted to a dummy. He said that his R/C receivers had been shown to be able to handle the new USA locos with no difficulty. Tony uses a fairly expensive, self protected motor controller integrated circuit and he said that he was not having difficulties. We both figured that USA Trains had changed the motors since my loco was built. He sent me the motors to change out for my original motors. When I got them, the first thing that I did was measure the motor stall current and I found that it is UNCHANGED from the motors in my GP-9 that I had measured before. Tony's motor controller (National Semiconductor LMD 18200) must be one tough cookie as it is rated at only 3 amps average current with a short current limit of under 10 amps. Two of these motors together would result in a stall current load of something like 30 amps. Further, the USA motors seem to rev up slowly when a step of power is applied. This makes it more likely that the motor will actually draw currents at or near stall levels for a fairly long period of time as they rev up.
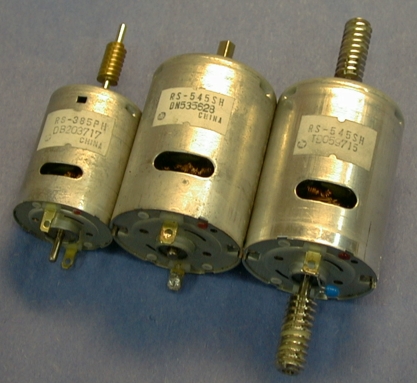 I took Tony's two motors (one of them is shown on the right), a motor from an Aristo Pacific (center) and a pair of motors from an Aristo diesel (like the one on the left) and tested them.
I took Tony's two motors (one of them is shown on the right), a motor from an Aristo Pacific (center) and a pair of motors from an Aristo diesel (like the one on the left) and tested them.
All these motors are manufactured by Mabuchi. The Aristo Pacific and USA motors both carry the same model number, RS-545SH, but they are clearly mechanically and electrically different. The model numbers describe a series of motors that can be configured for many different operating conditions. One high voltage version of this motor has a stall current rated at 45 amps. The USA motors draw about twice the running and stall current of the "similar" Aristo Pacific motor. The Aristo diesel motors, part number RS-385PH, are physically smaller with a running current about half that of the Aristo Pacific motor even though the stall current is about the same as the Pacific motor.
Two tests were done. Each motor was measured for unloaded current from its starting voltage to about 20 volts. Then each motor was physically stalled and 7 to 10 volts was applied for a second or two and the current was measured at several different armature positions. The motor was clamped in a vice and the gear was stalled with a rubber jawed clamp.
| Motor Type | Measured Stall Resistance Range
(ohm) |
Max Stall Current at 16 VDC | |
|---|---|---|---|
| Min | Max | ||
| USA Trains F3 Motor
#1 |
1.1 | 1.4 | 14.5 |
| USA Trains F3 Motor
#2 |
1.4 | 1.7 | 11.5 |
| Aristo Pacific | 4.2 | 4.5 | 3.8 |
| Aristo Diesel
#1 |
4.4 | 5.7 | 3.6 |
| Aristo Diesel
#2 |
4.0 | 4.9 | 4 |
 The unloaded free running current of a motor should be essentially independent of applied voltage, although the speed will change greatly. This characteristic is shown in the graph as the free run current changes less than 50% for a 500+% increase in voltage. Even with no load, the USA motor takes more current just to keep turning. As the mechanical load is increased the current at any given voltage will increase as the motor slows until the motor stalls and the current goes to the stall current value.
The unloaded free running current of a motor should be essentially independent of applied voltage, although the speed will change greatly. This characteristic is shown in the graph as the free run current changes less than 50% for a 500+% increase in voltage. Even with no load, the USA motor takes more current just to keep turning. As the mechanical load is increased the current at any given voltage will increase as the motor slows until the motor stalls and the current goes to the stall current value.
The USA motor starts at a lower voltage than the others. This is expected of a motor with a very low DC resistance. At very low voltages, the motor can draw enough current to generate the torque necessary to overcome the bearing and brush friction and it can start and run at lower voltages. While this may be considered an advantage when using pure DC power, the very low resistance is a serious liability when running from pulse width modulated power.
This data shows that the USA motor is different from the physically similar Aristo Pacific motor and the motors used in similar locomotives from Aristo. At stall or at free run, the USA motor draws a lot of current.
[ Top ]
Some decoders incorporate back EMF motor control. This is a system where the decoder can detect the actual speed of the motor as its load changes and adaptively compensate the power delivered to the motor in an attempt to keep the train speed more constant.
If you find that your engines tend to run away downhill and you don't like having to reduce speed on the grades to avoid a wreck, then back-EMF control is a highly effective feature. A back EMF decoder can easily detect an overspeed motor and cut back the power to slow it down.
Back EMF decoders can enhance the very slow speed capability of some engines, especially those with high gear reduction ratios. If a motor isn't turning when it should be, the back EMF it generates will be zero. The decoder will detect that the motor is stalled and increase the power applied to the motor to get it going. This can make an engine pull very strongly and smoothly at low speed which materially improves slow speed switching operations.
These improvements do not come without a dark side. Back EMF decoders do cost more and in some instances, back EMF control is not appropriate.
Speed Regulation Limits. Use of back EMF in the wrong instance can degrade performance instead of enhancing it. A back EMF decoder can only regulate motor speed within the range that the motor normally operates. If your engine tends to lug down, stall or slip, a back EMF decoder cannot help. The engine will still lug down, stall or slip. All the decoder can do is try to keep the motors running. In the case where a locomotive slows down on an upgrade, the motors are already having difficulty handling the load. A fancy decoder won't help. The decoder will increase the power applied to the motor, but if is already lugging due to overload, the increased power will just cause the motor to overheat instead of pulling harder.
Back EMF does best in boosting the power when needed in low speed situations or reducing the power when needed in high speed situations. Boosting the power in high high load situations usually doesn't work unless the motor itself has a lot of performance margin and then it wouldn't need back EMF control anyway. At high speeds, the duty factor of the PWM pulse is already high so the decoder can't increase its power output much anyway.
MU or Multiple Motor Operation. Back EMF decoders can tend to impact MU operations of mismatched locos. If the decoder has a really tight control loop, it will want to make each engine run at a particular speed. If that speed doesn't happen to match the speed of the other engine, the two will buck more severely that they would if back EMF was not used. Some decoders allow the "gain" of the back EMF control loop to be adjusted so that a compromise can be set between absolute engine speed regulation and load response. These adjustments will minimize the tendency to buck, but at a loss of absolute speed control.
Bucking will also occur if two back EMF decoders are used in the same engine, one for each motor. If this problem does occur and the back EMF response cannot be adjusted, then the best way to patch around it is to disable the back EMF control in one of the decoders. This way, one truck or engine (with back EMF) will tend to regulate speed and keep the consist moving and the other will just provide raw power. It may be dragged or bucked some by the other engine or motor, but not as badly as if BOTH engines or trucks were trying to regulate separately.
Binding. If the mechanism of an engine is not completely smooth, then back EMF control can interact with a repeating bind and cause surging. If the back EMF voltage is sampled at intervals only a few times a second (as in the Lenz LE230) and a mechanism bind occurs, then the decoder may tend to detect the bind and correct it AFTER the bind has gone away by itself (for that motor or gear revolution). Then the engine will surge a little until the decoder detects that the motor has sped up. Depending of the interval used for back EMF sensing and the period of the bind, this surging can reoccur at regular intervals. Decoders with higher switching speeds and higher speed sample rates will be less sensitive to this kind of problem. The surging will also tend to smooth out as the engine speed increases.
Stalling, or Slipping. If your engine does not have enough power to accelerate a train by itself, then a back EMF decoder cannot make the engine work harder and compensate for loss of speed under load. All the decoder can do is apply maximum power to the motor and the motor will do what it can. If the engine slips, then the decoder will amplify the slippage by making the motors run at constant speed, slipping the whole way. If the engine tends to lug down under load, then the decoder will try to run the power all the way up. This will cause excessive current to be drawn by the partially stalled motor putting both the motor and the decoder at extreme risk of thermal damage.
Motor Noise. To measure the back EMF of a motor, the controller must stop applying power for a short time and sense the motor voltage. If the decoder is "silent running" the use of back EMF may actually increase the motor noise. This is because the sense period is fairly long so that the power dropouts occur at a repetition frequency which is lower than the normal "silent" pulse repetition frequency. It is possible to hear these dropouts as a buzz or hum. However, even at its worst, the resulting noise is nowhere near the motor noise of a low frequency decoder.
[ Top ]
I have some ideas of what I'd like to see in a DCC system optimized for out of doors operation. Some of these ideas don't line up very well with the ideas of the manufacturers, if the cool reception I've received is any indicator. However, I'll describe them anyway.
Walk Around Control. An outdoor DCC system MUST incorporate wireless walk around control. Since infra red links don't work in the presence of sunlight, the only other approach is radio control. Radio systems are just becoming available, but they are pretty expensive.
Throttle Complexity. The currently available radio systems have VERY complicated radio throttles. They are full feature throttles covered with buttons and knobs. What is needed is a radio throttle that can be handed to a novice user. We need a throttle where each control does only one thing. On some of the throttles, each button may have 3 or 4 different functions depending on the order or combinations in which buttons are pressed.
Further, the demand for these radio throttles will probably never be really large, so we won't see a lot of new designs. If a user doesn't like the throttle layout, he will have little option but to accept it and grumble about the stupid thing.
There should be a method to adapt existing proprietary radio throttles to DCC systems. Many of us have throttles that we already like and we would like to continue to use them to control a DCC system. I would like to see a DCC throttle that will accept a DC input with the voltage controlling speed and the polarity controlling direction. We could then hook an existing radio receiver from any manufacturer to such a DCC throttle and use our existing radio controls as the most basic of DCC throttles.
A slight extension of the "analog throttle" concept is to allow a few contact closure type inputs as well that could be used to activate the lights, bell and whistle functions of most of the large scale decoders.
Some of the existing proprietary radio systems have limited range, primarily due to the inability to implement an adequate antenna on the locomotive. This same receiver, when mounted trackside and connected to a DCC throttle, could be equipped with an adequate antenna and the range of these systems would substantially increase.
Battery Backup. The currently available DCC systems require track power to transmit the power and control signals to a locomotive. In many areas, track power is pretty unreliable. It would be a real advantage to be able to carry a small rechargeable battery on the engine that would charge from the DCC power on the track when it was available and run off the battery when track power dropped out. Commands could not be transmitted to the engine during a track power outage, but at least it would continue to run smoothly. The decoder would have to be set to keep doing what it was doing while is it not detecting valid DCC packets on the track.
Full Battery Power. A radio receiver could be used on the locomotive to receive commands when the commands couldn't get through on the track or when there is no signal on the track at all as might be found in a true battery powered operation. The radio transmitter could be a handheld unit that would transmit only when a command changed, similar to many of the proprietary systems now in use. The system could also take advantage of a trackside transmitter that had enough power and a good enough transmit antenna to get to any locomotive at any reasonable range even if the locomotive had an inadequate antenna which is often the case. In this case, the trackside transmitter would operate on a different frequency than the handheld throttles and could relay commands from a radio throttle or a wired throttle. It could transmit continuously to replicate the command signals that may or may not be applied to the track.
With this system, all, part or none of the track could be powered. Reverse loops would be handled easily by simply isolating them and leaving them dead. Power would not be backfed to the track from a decoder equipped loco. These same engines could still be used on DC powered track as the decoders would revert to DC power when the track DCC signal was not detected, just as some of them work now.
Full up battery power could be handled as well with completely dead track. In this case, the radio link would be the only way for commands to get through. Running DCC this way would not seem to provide much advantage over existing proprietary radio throttles, however there would be some minor advantages. MU operation would be easier. It might be easier for several manufacturers to agree on a unified radio format between the trackside transmitter and the radio decoders so that users could mix and match better between various manufacturers.
The DCC receiver/decoders that ran from partial track power would have to manage charge rates for the battery. Selection of an appropriate battery would be critical. In this service, the charge/discharge cycles of the battery would be essentially uncontrolled. NiCad batteries probably would not put up in this service too well. A gel cell or NiMH pack would probably be more appropriate.
 A properly implemented combined radio/DCC system has the potential of overcoming all of the shortcomings of regular DCC, conventional track power and conventional radio/battery power while providing all the advantages of each. However, all this nice stuff will still cost money. This is a disadvantage that will not go away.
A properly implemented combined radio/DCC system has the potential of overcoming all of the shortcomings of regular DCC, conventional track power and conventional radio/battery power while providing all the advantages of each. However, all this nice stuff will still cost money. This is a disadvantage that will not go away.
The key parts of this system are the standard interfaces between the command station and the TX and between the onboard RX and a decoder. This way, the radio gear would be independent of the rest of the stuff and international frequency allocations restrictions could be worked around with nationalized radio gear. The trackside transmitter would have sufficient power to communicate reliably with all the moving locos, either by radio only or by a combination of radio and track signals, and also communicate back to the handheld throttle to allow the two way communications needed to implement a full remote throttle. The handheld throttles would have an intermittent transmitter to optimize battery life, the trackside one would be on all the time. Wired throttles could be modified to accept analog inputs so that additional nationalized radio gear could be adapted for "operate only" throttles. The decoder could manage the charge and discharge of an onboard battery to cover over the dead spots, or with a large enough battery, to allow complete battery powered operation without the need for track signals at all.
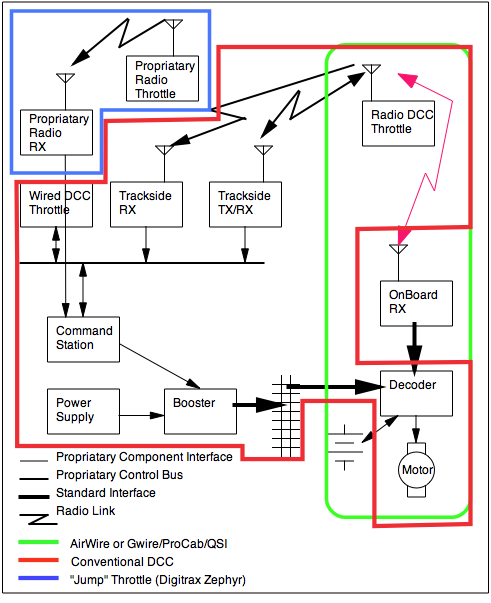 When I originally drew the diagram above in about 1998 much of this gear didn't exist. By 2010, almost all of the stuff on the diagram is actually available from various sources, but probably not implemented all together.
When I originally drew the diagram above in about 1998 much of this gear didn't exist. By 2010, almost all of the stuff on the diagram is actually available from various sources, but probably not implemented all together.
The green box represents the AirWire or GWire/QSI/ProCab solution. This is turning out to be one of the more effective and popular configurations in use. It's still DCC inside, it just doesn't look like it.
The red box is conventional DCC as implemented by Digitrax, NCE, Zimo, Lenz and others. The trackside TX part is integrated into a Digitrax UR-92 duplex transceiver or NCE duplex base station/repeater.
The blue box is known as a "jump throttle" in the Digitrax Zephyr system where a power pack or other DC source is converted to DCC commands by the command station.
Users could add capability as they needed, all of this hardware would not be required in all instances. For battery power operation, the booster and high current power supply could be dropped. The wired analog throttle would only be needed if the user wanted to use his own radio gear. The trackside TX, the onboard RXs and the battery would not be needed if track power worked well enough. The secondary trackside RX would only be needed on large layouts to enhance the reliability of the radio link. The two way link to the full throttle would only be needed if the user wanted to remain independent of the control bus for all throttle operations. The radio DCC throttle and trackside RXs would not be need at all if a user elected to use a wired full capability throttle and rely on simpler proprietary radio throttles and receivers for operation.
[ Top ]
Conversion to DCC should be a carefully thought out process primarily due to the expense and hassle involved. For many, the conversion to DCC would be a waste of time and money. If you mostly run one train at a time, or have multiple trains running on separate tracks, then DCC provides little operational advantage and conversion would make little sense.
Many multiple train layouts are set up for automatic train operation with magnetically operated controls. DCC will entirely mess up that kind of system. It is possible to use DCC to materially improve overall automation with the use of block occupancy detectors and computer control, but these systems are complicated and require a lot of additional expense and programming to get going. Full DCC based automation should be attempted by only the most hard headed and persistent of computer nerds.
However, if you like to have multiple trains going, often sharing the same main line, do a lot of switching and complicated train movement, have multiple operators or just like to play with techno-toys, and you have some extra money to burn, then full up command control is for you. DCC is a good way to implement command control.
Fortunately, DCC can be implemented incrementally. If you already have a cab control system implemented, then just substituting the DCC booster for one of your existing power packs is an easy way to go. If you have only one power pack, then wire the DCC booster and your existing pack through a heavy duty DPDT toggle switch so that you can switch back and forth between DCC and your regular power pack while you are implementing the DCC conversion.
It is also important to select decoders which implement analog conversion well. A decoder with analog conversion capability will detect when there is only DC on the track and convert its operating mode so that the loco will run just like a regular track powered loco. This will allow you to run your DCC equipped locos at the same time as your analog locos with your existing power system. New equipment has an infant mortality characteristic and you may find that your initial single DCC booster, command station and throttle are single point failures. If one dies, and your locos can't analog convert, your DCC only locos are down until the offending component gets fixed.
Analog conversion is not perfect. With DC on the track, the track voltage must rise to 6 volts or so before the decoder wakes up and can determine what to do. Also, pulse power systems, such as Aristo PWC, can confuse analog converted locos because they think that the pulse stream coming in might be DCC and convert back to DCC. They'll sit there and do nothing. However, when a decoder will run in PWC, it'll run better than with DC as the high peak voltages of PWC will light up the decoder sooner and low speed operation is improved. Noise on the track from other locos running at the same time can also confuse an analog converted decoder. It may try to read the noise as DCC packets and convert to DCC and then back again. This will cause the loco to operate in fits and starts.
A single analog loco can be run on a DCC system at address 0 as a stopgap measure, but I try not to do it too much because the DCC signal does beat up on regular motors to some extent. I've not burned anything up this way yet, but the stresses are higher and the chances of a motor failure are increased.
There are two ways to get started. Either buy a bare bones DCC system so that you can get your feet wet with minimal cost exposure or buy a full up system with the intent of not having to upgrade later. You can always sell the stuff and recoup some of your investment if it doesn't work out or if you find the need to upgrade. You can also buy used stuff from other DCC pioneers that have outgrown their starter equipment.
In any event, get only one or two decoders to start out. You may find that your initial choice of decoder is not the best match to your individual needs and that you need to select another kind. The decoders DO NOT have to be from the same manufacturer as the DCC command equipment.
With DCC it is NOT necessary to get your command station and decoders from the same manufacturer. Each decoder should work properly with every command station. There have been instances of incompatibility. These are usually due to bugs in either the command station or decoder firmware. Bugs like this are hard for the user to ferret out but fortunately are few.
The more basic command stations may not be able to program or operate all the features of advanced decoders. It is better to start out with a full featured command station and simple decoders than the other way around.
Select the initial loco to convert based on good DC performance and ease of internal access. You will probably find that you will be inside the first loco many times before you close it up for good. Try to pick one that you can run without the shell to allow easier testing. If you can, select a loco with sound so that you can play with controlling your sound remotely. You may find that you will want to be careful in both your sound system and decoder selection so that you can optimize sound control. Steam locos are often harder to convert than diesels as a diesel is more or less self contained and they are usually easier to work on.
If your command station allows it, experiment with programming all the functions of the decoder just to see how they respond and what they can do. Wire up lots of functions (if your decoder supports them) so that you can determine how accessory function control will affect you.
I feel that some sort of walk around radio control is essential for any outdoor track powered layout. As of early 1999, only Digitrax offered cost effective radio control and even that isn't cheap. I understand that LGB, CVP, Wangrow and NCE will be offering walkaround throttles in the future.
Run your newly converted equipment under a variety of conditions before you go out and spend a lot of money on more decoders. Be sure that the decoder that you settle on meets all your needs. Don't be afraid to experiment with other brands.
While I was doing my DCC conversion in the late 1990's, was I was still waiting for the ideal decoder to show up so I put additional decoder purchases in the slow lane until some better ones were available. In the meantime, I ran a mixed system. Some days I ran analog locos and some days I ran DCC locos. I also ran some locos equipped with radio receivers that use the DCC signal on the track for constant track power. I also ran battery powered locos along side both the DCC and track powered locos.
10 years later, the state of decoders had improved significantly. All the major manufacturers make pretty good ones. The European decoders tend to have some more advanced features, but they also cost a lot more. I tend to rely now in Digitrax and NCE as my decoder sources.
[ Top ]
As you convert to DCC operation, you will want to pick a track voltage to use. The voltage on the track should be kept to the lowest acceptable value for your kind of operation. The track voltage will basically determine the maximum speeds of your equipment. It will also determine the brightness of any lighting or the intensity of smoke in unregulated smoke units. Once you pick a track voltage, this will determine what voltage of bulbs, smoke units or value of series resistors that you use for LED lighting.
You should settle on a track voltage based on the speed of your SLOWEST loco. Reduce the track voltage until the slowest loco still runs fast enough. Then constrain the speed of the faster locos by individual programming with a speed table or by using CV5 and CV6 to set the max and mid voltages.
Digitrax recommends 12 volts for N scale, 14 volts for HO scale and 20 volts for large scale. There is a switch on the boosters that allows the track voltage to be picked. There is also an internal adjustment that can be used to tweak all of them upwards or downwards somewhat.
NCE provides two settings on their boosters, 16 volts (not adjustable) as the "normal" setting and an "adjust" setting that is tweaked with an internal adjustment.
If you run a large scale narrow gauge operation, then 16 or less volts will be about right. Most locos will do about 30 smph or so at 16 volts. For standard gauge or main line operation, 16 volts is not quite enough. Over a period of time I settled on 22 volts 0-P on the track. I measure it with an oscilloscope or a true RMS (root mean square) voltmeter. For the flat topped waveform of DCC, the 0-P voltage is identical to RMS.
It is possible to measure the DCC track voltage with a standard DC voltmeter with some degree of accuracy. The first method is to measure the voltage on one rail with respect to the case of the booster. The reading will be half of the DCC track voltage assuming that the speed of the "analog" address, 0, is also 0. The second involves using a bridge rectifier. Connect the AC terminals of a bridge rectifier across the track and measure the voltage on the + and - terminals. This will be the track voltage minus about 1.2 volts. Do not put a filter capacitor across the +/- terminals of the rectifier because it will charge up to the peaks of any overshoot on the track and present you with an artificially high reading. If you want to see the value of the peaks, put a 0.01 uF cap on the +/- terminals and read the voltage which will be approximately the voltage of the highest recurring spikes on the track. Then to measure the track voltage, you need to load the capacitor with a 100 ohm, half watt resistor. If you do see peaks and you want to get rid of them, then install a 100 ohm half watt resistor in series with a 0.1 uF capacitor across the track at the furthest point of the track and recheck it. This termination will help strip off the switching transients that occur due to the accumulated inductance of long track feeders and rails. The termination resistor will get a little warm.
Note that the maximum possible track voltage is determined by the voltage of the source driving the booster. For an AC power source, it works out that the maximum DCC voltage available will be a volt or two higher the AC input voltage, but the AC input current will be about 1.6 times higher than the DCC output current. The other 60% of the input current covers losses in the booster and the conversion of AC input current to DC output current at near the peak of the AC voltage. For a DC input voltage, the maximum DCC output voltage will be about 4 to 6 volts less than the DC input voltage and the current will be somewhat higher to cover the power requirements of the booster electronics.
If the booster is operated at less than it's maximum output voltage (depending on the input voltage) then it will run warmer than necessary. As it regulates the DCC voltage downwards it absorbs a portion of the input voltage at the full output current and dissipates that power as heat. You should therefore select an input source and voltage that is in line with your expected output voltage.
After several years of experience have settled on 22 VRMS for my track voltage on my outdoor layout. This allows the fastest trains to run at the fastest speed that I consider reasonable and safe on my layout. If any individual engine wants to run faster than it should at that voltage, I program Vmax (CV05) and Vmid (CV06) downward to limit the speed. This works in 28 speed step mode for most decoders. In 128 speed step mode, most decoders ignore these two CV values as there are plenty of speed steps left for precise control even if you don't crank the throttle all the way up.
I am just in the process of setting up DCC on my indoor layout and I expect to use 16 VRMS as a starting point going up to 18 VRMS if absolutely required but based on the speeds that I run trains there but I don't expect to have to go higher. Actually, I expect that I may want to turn it down a little.
[ Top ]
You may have noticed that up to this point in this page I have not indulged in too much of the typical DCC propaganda. If you want to see what is available and read all the hype, check out these links.
[ Top ]
For what its worth, I'll relate the experience that I've had so far with the Digitrax Chief system that I selected. I picked this system because at the time, Digitrax had the only shipping walk around radio control system, and the system was reasonably priced (if you consider nearly $750 for a complete R/C system with two decoders to be "reasonable"). There are less expensive DCC solutions out there, but they don't have R/C, lack some other features, or can't handle much current. The standard Digitrax command station is rated at 5 amps, the 8 amp model is a special order version but it doesn't really do 8 amps either.
As originally built, my layout used cab control with two Aristo Train Engineer trackside receivers, each representing one cab. The track is blocked reasonably and most sidings are power routed. With the interlocking turnout control system that I use, switching between engines is very easy. I just park an engine on a siding, press two buttons on the TE transmitter to select a route to another siding where another engine is parked and run the new engine off the siding. I cannot control both engines independently and simultaneously on the same block, but it works pretty well. I can control everything except switching track sections between the cabs from the TE transmitter. I could do that too if I thought it was worth the effort and cost to install the latching relays required.
With DCC, the power routing and blocking is not necessary. I can park an engine anywhere and start up another or I can leave the original engine running. To the extent that I need to avoid collisions, engine control is completely independent.
 I found that the Digitrax Chief DCC system worked as advertised except that the radio control didn't have nearly the 300' range advertised and the power capability of both the booster and the decoders seem to be considerably less than claimed. I originally got only 30' with reliable control and some control at 50'. I sent the radio gear back to Digitrax and received it back with an "upgrade" which increased the range to 70' with some control at 100'. I did have some trouble with defective decoders, but my retailer (Loy's Toys) bent over backwards to make things right.
I found that the Digitrax Chief DCC system worked as advertised except that the radio control didn't have nearly the 300' range advertised and the power capability of both the booster and the decoders seem to be considerably less than claimed. I originally got only 30' with reliable control and some control at 50'. I sent the radio gear back to Digitrax and received it back with an "upgrade" which increased the range to 70' with some control at 100'. I did have some trouble with defective decoders, but my retailer (Loy's Toys) bent over backwards to make things right.
The Digitrax system allows one or more radio throttles to communicate with one or more receivers. Multiple receivers are all connected to the same networking bus so that if one doesn't hear a command, perhaps another will. This allows a degree of spatial diversity. Up to ten transmitters can share the same receiver(s). The transmitters send each command in short bursts four times at random intervals so that if two transmitters jam each other on one try, they are not likely to do so again on the next try. The radio system can be assigned to one of 7 different codes so that independent systems operating in radio range of each other will not receive each other's codes.
All the components of the Digitrax system connect together with a 6 wire bus wired with standard RJ12 modular telephone connectors. Digitrax calls this their LocoNet bus. Adding or removing components is done by plugging them in or unplugging them. The system figures out what is happening automatically and logs the components in or out automatically as they appear or disappear. Overall this bus system works exceptionally well.
Power pickup reliability is not a lot different between DCC and analog track power. At very low speeds DCC is better. At the high voltage on the track, small changes in pickup resistance don't matter nearly as much as with low DC voltage on the track. On very dirty track or with locos that have only 4 wheel power pickup, DCC tends to be worse as complete power interruptions cause the decoders to reset. When power is restored, it takes a little time for the decoder to wake up and start working again. Since I can switch between the DCC system and one of the TE receivers at the flip of a switch, I can evaluate the differences in almost real time. The Digitrax decoders (or any other fully NMRA compliant decoder) will revert to analog mode when they sense power on the track without the DCC coding so the decoder equipped locomotives will run in both modes.
I have two Aristo RS-3's, they both had Digitrax DG580L DCC decoders for awhile. Before DCC, I used to run these engines in MU all the time and they ran at virtually identical speeds so that there was minimal bucking. Before the DCC install, they could run for hundreds of feet while disconnected from each other and stay virtually the same distance apart. After the install of DCC in one of them, the speed matching was not so close, but it was still good enough to MU the engines on analog power or on DCC power with the analog loco running at DCC address "0." Of course, the analog loco buzzes and hums when running with DCC, especially at low speeds. The DCC loco also hums some at low speeds due to the low pulse repetition frequency used by the Digitrax DG580L decoders. DCC has the ability to use a programmable speed table so that engines that naturally run at different speeds can be equalized so that they run at the same speed over their entire speed ranges. I haven't needed to do that yet. When both engines were equipped with decoders, their speeds matched closely again.
I have had trouble with the Digitrax DG580L 5 amp decoders, both the ones in the RS-3 have failed. One became flaky after being overheated once (it shouldn't have overheated at all because the current draw wasn't anything near the decoder's claimed capability) and the other simply burned up while I was trying to start a heavy train. I suspect that the DG580L has a problem at currents above 2-3 amps or so. I have since installed a couple of North Coast Engineering 4 amp decoders in the RS-3's and they now they run fine under any load.
I put the replacement DG580L's (Digitrax repaired one for free and replaced the other for free) in smaller locos and then over time changed them out for better decoders that don't make so much noise. All three of the DG580L's that I have are now surplus, being replaced by Zimo MX65S/N or NCE D408 or D408SR decoders because of less than acceptable overall performance.
Overall, engine performance is better with DCC than with linear or PWC track power, especially at very low speeds. Without messing with any of the decoder programming, I have been able to get a decoder equipped engine to run at about 60 seconds per tie for extended periods. In one test, the RS-3 took a full hour run 5 feet. This level of speed control really isn't necessary, but operation at scale speeds of 1 or 2 smph is important and the DCC system handles it fine. Even with Aristo PWC, 2 smph is hard to maintain for any distance with most locos.
However when using the smaller locos with fewer power pickups, I find that the DCC equipped engines run less steadily on moderately dirty track than with analog power. I can hear the motor rev up and down constantly as the engines run. When the same engines are run in analog mode (with PWC on the track), they run much more steadily. This is obviously not a power pickup problem or the engines would hesitate in analog mode as well. I think that the Digitrax decoders are getting too many bad DCC packets due to power pickup noise and are shutting down or trying to convert to analog mode too soon. While the decoder is trying to figure out what to do, the motor power is interrupted and the engine hesitates. If I turn off the analog conversion option completely (CV29=02), the hesitation is much worse as it stops completely when the DCC signal is too garbled. I suspect that the poor engine performance on dirty track is because it is constantly switching between DCC and analog modes.
 The Digitrax DT100R radio throttle is considerably less user friendly than the Aristo Train Engineer throttle. This is the main reason that I would like to see a DCC throttle with an analog input. After switching back and forth between the TE and the DT100R, the TE is the clear winner from a user interface point of view.
The Digitrax DT100R radio throttle is considerably less user friendly than the Aristo Train Engineer throttle. This is the main reason that I would like to see a DCC throttle with an analog input. After switching back and forth between the TE and the DT100R, the TE is the clear winner from a user interface point of view.
 The DT100R is no longer being manufactured. It was replaced by the DT300R which is the same size and shape, but has a much more user friendly display. Then the DT300 was discontinued in deference to the DT400. The photo is of the even larger DT400R. This unit has many more buttons such that each button does usually just one thing instead of being multi-modal like on the DT100R and DT300R. Even more significant, the DT400R (and DT300R) operate in mostly decimal mode so that it MUCH easier to use. If you really like hexadecimal you can set it to display hex instead.
The DT100R is no longer being manufactured. It was replaced by the DT300R which is the same size and shape, but has a much more user friendly display. Then the DT300 was discontinued in deference to the DT400. The photo is of the even larger DT400R. This unit has many more buttons such that each button does usually just one thing instead of being multi-modal like on the DT100R and DT300R. Even more significant, the DT400R (and DT300R) operate in mostly decimal mode so that it MUCH easier to use. If you really like hexadecimal you can set it to display hex instead.
The DT400R is a lot longer than the other throttles, but after using it for awhile, it doesn't seem to be much of a problem. It can be held the same way and the knobs still fall in the right spots to be easily accessed without looking at it. I am still not used to all the new button positions, but it'll come after awhile. Overall, this is a better unit than the smaller ones.
There is one feature of the Digitrax throttles that I like better than the early TE throttles. The reverse control is one button. Each time the button is pressed the engine will go the other way. Coupled with the excellent slow speed reliability, this makes uncoupling Kadee couplers much easier. The TE has left and right buttons. You have to press the correct one to get the engine to reverse. Depending on how you are standing with respect to the engine and where the engine is on the layout, pressing the left button may make the engine go right. Later model TE throttles have adopted this same approach.
The Digitrax throttle is capable of turnout control when stationary decoders are wired to the turnouts, but selecting a particular turnout is a somewhat complicated. First, a mode change is required into "switch" mode. Then the address of the turnout is selected either with the knobs or by entering the address on the keyboard. Then the "t" (thrown) or "c" (closed) button is pressed to actually command the turnout. With TE based system that I devised, I just press two buttons to select a predefined route and any number of turnouts are thrown automatically. The Digitrax system can also set routes. Routes are programmed into the command station and selecting a route follows the same command path as selecting an individual turnout. I found myself carrying around both a TE to control turnouts and the DCC throttle to control the trains. I used to set the TE down and pick it up only when I need it. It acted like a portable control panel for the turnouts. Then I used the Digitrax DS64 stationary decoders to also command my route system. Commanding a route is a little more complicated than with the TE but it is acceptable. Once I am in switch mode (one button), selecting a route is done by pressing one to three keys, depending on the address of the route being selected. If the right route number is already on the display, then I need press only one key. If the address is one digit long and different from the one on the display, I need to press a number key and the t or c key. If the address is two digits long and different than the last one used, I need to key in two numbers and then the t or c key.
The DT100R throttle is a full function dual throttle. However, it has only two knobs, eight buttons, a few LED indicators and a 4 character liquid crystal display. Therefore each button and indicator has multiple meanings depending on the mode that the throttle is in. It can get really confusing and pressing buttons in the wrong order can cause odd things to happen. Until you get really used to it, it can be VERY frustrating.
The DT100R is a dual throttle in that it has two speed knobs. It can control two engines at the same time. This is nice and it switches back and forth between the engines cleanly. However, trying to keep an eye on two engines at one time is about all one person can handle. Multiple engines can be grouped into a consist so that they will act as one engine. It is fairly easy to set up and break up a consist although there are three different ways to do it.
Individual engines are identified by an address. The basic address system allows 127 decoder equipped engines with a 128th engine being the analog engine at address 0. The engine address is represented with 2 characters on the throttle display. Engines with addresses past 99 have a hexadecimal character as part of their addresses instead of a digit on the DT100. The DT400 operates in decimal mode all the time so that hex is never required. The Digitrax system allows these 2 digit addresses to be aliased to 4 digit addresses that correspond to the 4 digit engine numbers painted on your engines so that they are easier to remember. With the right decoders, a full 4 digit address can be assigned to the decoder and 9000 or so engines can be individually addressed. Also some decoders allow native 4 digit addressing.
 The command station itself needs a power source which Digitrax does not supply. As a matter of fact, few of the DCC manufacturers provide a power supply, you are expected to provide your own. For large scale, you need 18 to 24 VAC or 24 to 32 VDC to run the command station. A DC source needs to be able to supply current at the booster rating. The lower voltage AC source needs to source up to 1.4 times the booster rating. I used an ART-5460 power source to run the command station for a period of time, but its 20 volt DC output is not quite high enough. I eventually bought this 10 amp transformer kit from Loy's Toys and this proved adequate to drive the Chief. With 18 VAC into the Chief I get about the same top speed as with 20 VDC into the TE receiver while running a single train. The AC current meter did not come with the Loy's Toys kit, I added it later. Eventually, I made another power source with a 22 VAC 15 amp transformer to power a larger booster.
The command station itself needs a power source which Digitrax does not supply. As a matter of fact, few of the DCC manufacturers provide a power supply, you are expected to provide your own. For large scale, you need 18 to 24 VAC or 24 to 32 VDC to run the command station. A DC source needs to be able to supply current at the booster rating. The lower voltage AC source needs to source up to 1.4 times the booster rating. I used an ART-5460 power source to run the command station for a period of time, but its 20 volt DC output is not quite high enough. I eventually bought this 10 amp transformer kit from Loy's Toys and this proved adequate to drive the Chief. With 18 VAC into the Chief I get about the same top speed as with 20 VDC into the TE receiver while running a single train. The AC current meter did not come with the Loy's Toys kit, I added it later. Eventually, I made another power source with a 22 VAC 15 amp transformer to power a larger booster.
Decoder address programming must be done on a special programming track that is electrically separate from all the other track. Also, the wires between the command station and the programming track must be fairly short because extra parasitic resistance to the programming track may interfere with the method that the command station and decoder use to communicate during programming. On indoor layouts, a siding or section of the main track is sometimes switched between the programming track and main track connections. I had no such piece or section available so I just wired a separate 3' chunk of track to the programming terminals. When I need to program a decoder, I just pull this track out of the closet where the controls are and set it on the ground. With some decoders and DCC systems, programming decoder addresses MUST be done on the programming track. Once a decoder address is set, programming of the other parameters can be done on the main track or on the programming track. Most newer systems will also all programming of the address on the main in OPS mode, BUT, you have to know the decoder address first and select that decoder. Programmed values stored in the decoder can be read back while the loco is on the programming track, but typically cannot be read back while programming on the main track. Some decoders will kick the motor hard enough when they receive a command that they will jump a little when the accept a programming change on the main. QSI decoders will actually speak the results of an OPS mode command in a synthesized voice.
When a new decoder is installed, it should ALWAYS be tested first on the programming track. The power on the programming track is limited such that a miswired decoder will probably not be damaged although it won't program properly. If a decoder does not seem to accept programming properly, you'll have the opportunity to find and fix the problem before any permanent damage is done.
The decoders I initially used (DG580L) are rated at 5 amps. The Aristo engines usually draw about 2 amps. Even so, the decoder gets very hot. It has no real external heat sink by itself and after running at heavy loads for awhile, it would shut itself down due to over temperature. There is a small note on the decoder's instruction card about bolting the decoder to a metal surface. The DG580L needs a heat sink. It's just too small to reject the its own internally generated heat even at less than the maximum rated current.
These decoders have several function outputs that allow control of locomotive accessories such as lights and sound. The decoder supplies a constant positive voltage to power accessories on a blue wire. This voltage level depends on the DCC voltage on the track. For large scale, the accessory output voltage is usually about 20 volts. Locomotive accessories are connected between this blue wire and the function control wires which provide a switch closure to the internal decoder ground. Accessories that are wired to operate from the decoder MUST NOT be connected to either motor lead or to either track or you will surely damage the decoder. See my RS-3 Tips page, my FA Tips page or my Lionel Atlantic Tips page for more information on function wiring, especially as it relates to sound systems.
These particular large scale decoders (DG580L) have "FX" function capability. This means that some kind of special effect can be applied to one or more of the functions. For example, you could connect a firebox light to a function that has a random flicker attribute. A second headlight could be programmed to operate like a Mars light. Headlights could be programmed to follow Rule 17 dimming rules. Ditch lights can flash. Note that the FX functions can be applied only to four total functions, AND that functions 5 and 6 cannot be programmed with FX functions.
There is a peculiarity with large scale trains that must be taken into account when wiring DCC decoders. The convention for which rail is positive when an engine is going forward is backwards from HO so all the "left" and "right" rail notes in the decoder instructions need to be reversed. Actually, I found that it was easier to just wire the motor and track pickups without regard to polarity and then test to see if it was correct and fix the wiring if necessary.
In DCC mode, the decoder doesn't care what the track polarity is so the polarity of the red and black track wires doesn't matter. However, when the decoder has converted to analog mode, it does matter because this is how the decoder decides in which direction to run. To determine the properly polarity of the track and motor wires, first test the engine in DCC mode. If it goes the correct direction depending on which way you call forward, the orange and gray motor wires are correct. If it goes the wrong way, then reverse the orange and gray wires. Then put the engine and another non-decoder equipped loco on the same track and apply analog power to the track. If the engines go the same way, the red and black wires are correct. If the engines go in opposite directions, then reverse the red and black wires.
The biggest impact of this polarity reversal between HO and Large Scale is when you want to MU an analog loco with a DCC loco. You can either set the direction bit in CV29 to reverse to make the DCC loco run backwards or you have to couple the analog loco to run backwards.
I've also found a reversing trick that wasn't explained clearly in either the Digitrax documentation or Loy's Toys tips sheets. If a loco is running in reverse when it is added to a consist, it'll run in reverse within the consist. This applies to both analog and DCC locos. When you build a consist, just make sure that all locos are set to run in the same direction with respect to each other when the consist is formed and they'll run correctly inside the consist as well.
 Digitrax uses a little panel mounted receiver (for simlex radio throttles, a transceiver for duplex radio throttles). It is intended to mount in a hole in the facia of an indoor layout. To use it outdoors, it needed a weatherproof enclosure. I use this heavy plastic utility box that I bought from Marlin P. Jones and Associates for about $18. It was pretty expensive, but it was the only plastic one I could find that I though would be sturdy enough.
Digitrax uses a little panel mounted receiver (for simlex radio throttles, a transceiver for duplex radio throttles). It is intended to mount in a hole in the facia of an indoor layout. To use it outdoors, it needed a weatherproof enclosure. I use this heavy plastic utility box that I bought from Marlin P. Jones and Associates for about $18. It was pretty expensive, but it was the only plastic one I could find that I though would be sturdy enough.
 The UR-91 receiver is mounted inside. I painted the plastic to match the post that I mounted the box too. The plastic and paint do not seem to have impacted the radio coverage at all.
The UR-91 receiver is mounted inside. I painted the plastic to match the post that I mounted the box too. The plastic and paint do not seem to have impacted the radio coverage at all.
The Digitrax LocoNet wiring goes through this box from the backyard cabinet where the control equipment and DCC booster is located and back to the garage where another receiver and the command station is located. 12 V DC power is also brought in to power the receiver.
[ Top ]
My only direct experience with DCC command stations is with the Digitrax Chief. This is a full featured DCC system that appears to do practically everything that any DCC system does and it works pretty much as advertised except that it doesn't appear to be usable at its rated 8 amp output. It is a good 5 amp system. In this section, I am going to editorialize a little about the Chief.
Throttle Confusion. The early Chief used a DT100 throttle or DT100R radio throttle for control. Later versions use the DT400 or DT400R. The throttle itself is capable of doing anything that you might want for configuration and operation of the system. However, it has only two knobs, 8 buttons, 4 LEDs and a 4 digit LCD display. To make these controls and indicators do and show everything, each control or indicator has multiple meanings depending on the mode that the throttle in. This really takes some getting used to. Until you know your way around the throttle, it can be really frustrating. After you've climbed the rather steep learning curve, it works OK. Everything is in the documentation somewhere, but you have to reread it about once a month for 3 months or so before you will understand it all.
Output Current Capability. The standard DCS100 Chief is rated at 5 amps which is typically adequate for small scale layouts. There is a special order version that is rated at 8 amps, but I suspect that it really can't handle a full 8 amps. I installed an AC current meter on my 18 VAC power source and I find that under heavy load, the Chief will trip off when the average input current reaches just under 7 amps. Since the RMS output voltage is higher than the RMS input voltage, it would be reasonable to assume that the output current is probably less than the input current by some amount which implies that the Chief can't really do 8 amps output. Direct measurements of the input and output current of the Chief indicate that the input current is 1.6 x the output current at my input voltage at normal loads. This ratio changes at high load currents so direct measurements of the output current are needed to determine it's true capability. I do have the proper true RMS meters and by test (shorting the rails with the meters and a variable power resistor) I find that the output trip current is just 7 amps. By 3 amps, the output voltage has sagged considerably.
This "8 amp" DSC100 is a 1990 vintage unit. In 2008, I purchased a DCS200 for another layout. This one is also rated at 8 amps. It sags pretty badly under high load, but at least it will sustain just a shade more than 8 amps at the output without tripping. At this point, the output voltage has sagged pretty badly so it probably isn't really useful past 5 amps. This input for this unit is a 13 amp regulated switchmode DC power supply. It doesn't sag at all under this load.
 I got so tired of the Chief tripping off with just two trains running (it would trip every time with three) that I bought an NCE PB-110 10 amp booster. I moved the AC power supply to the new booster and powered the Chief from the AC output of an old Bachmann power pack. The NCE booster now powers all the track and the Chief's track output is unused. The NCE booster gets its input signal from the LocoNet with the aid of an adaptor cable that can be made by following the instructions in the NCE booster's instruction booklet. It worked fine right away. I could easily run three trains and the booster never tripped off even though the AC input current was a full 10 amps under the highest load. The NCE booster has an output current metering circuit which I haven't used yet.
I got so tired of the Chief tripping off with just two trains running (it would trip every time with three) that I bought an NCE PB-110 10 amp booster. I moved the AC power supply to the new booster and powered the Chief from the AC output of an old Bachmann power pack. The NCE booster now powers all the track and the Chief's track output is unused. The NCE booster gets its input signal from the LocoNet with the aid of an adaptor cable that can be made by following the instructions in the NCE booster's instruction booklet. It worked fine right away. I could easily run three trains and the booster never tripped off even though the AC input current was a full 10 amps under the highest load. The NCE booster has an output current metering circuit which I haven't used yet.
Maximum Track Voltage. The Chief command station has a three position toggle switch to set the output voltage in the "right" range for N, HO and G scale trains. The G scale setting is about 20 volts on the track. If you just put a regular AC voltmeter on the track, it will probably read about 28 volts because most AC voltmeters are calibrated for a sine wave form do not read true RMS voltage. The square wave form of the DCC signal confuses the meters.
After the 1 to 2 volts or so of voltage drop in the decoders is taken into account, the actual motor voltage works out to be just a little low. With 18 VAC supplied to the command station, it should be able to put out about 23 volts or so of DCC signal. However, the command station regulates the output voltage to the lower value of 20 volts. There is an adjustment that allows this regulated level to be changed. If you remove the cover of the command station, the adjustment is a small trimmer located right next to one of the Loconet connectors. It is adjustable with a small screwdriver from the front of the unit. Mine was set at about 9 o'clock. I ran it around to about 3 o'clock and the voltage increased by about 2 volts which produced a top loco speed that was just high enough to suit me. If any given loco still runs too fast, you can either set the maximum voltage CV to limit the speed or use a programmed speed table. Lighting that runs directly off the track or from decoder functions will run a little brighter with the higher track voltage, you may find that you have to readjust the brightness with resistors wired in series with the lighting. You will also find that the command station itself will not run quite as warm under heavy loads due to the reduced internal voltage drop.
There is a similar adjustment available on the PB110 booster.
Decoder Addressing. There are two NMRA standard ways to address a decoder. The default is 2 digit addressing that allows up to 127 DCC equipped locos. Extended, or 4 digit, addressing allows over 9,000 locos. The usual plan is to set a 2 digit address to the last two digits of the loco number to make the address easy to remember. In case you have locos with the last 2 digits duplicated, you have to dream up a new address for one of them. 4 digit addressing allow you to directly address each loco by its full 4 digit address. However, to set the address you have to use one knob to set the first two digits and the other knob to set the other two digits. This is somewhat of a pain and unless you really have more than 127 locos, I don't recommend it.
4 Digit Aliased Addressing. Digitrax has a included a third way to address locos. A 4 digit alias is associated with the real 2 digit address. The mapping between the aliased address and the real address is stored in the command station. This way you can use the full 4 digit loco number as an address, but only for a total of 127 locos. The 4 digit aliased addresses are displayed in sequence "below" the regular 2 digit address range. Only aliases that are actually defined are shown in the list so that it is fairly easy to scroll through the list to find the one that you want. The new Digitrax throttles do not support aliased addressing.
The dark side of 4 digit aliased addressing is that setting them up is difficult (the instructions on how to set them up are cryptic) and deleting them is even tougher. After I had messed with them awhile, I concluded that, overall, 4 digit aliased addressing was more trouble than it was worth. Further, I couldn't make the aliased addresses go away following the instructions in the Digitrax manuals or with the help provided by Loy's Toys documentation. I ended up removing the backup battery from the command station to give it a "lobotomy" and I FINALLY managed to make them go away.
Speed Steps. Most DCC decoders will operate in 14, 28 or 128 speed steps. Some decoders will operate at 55 speed steps as well. There is an upside and downside to each speed step range. I find that 14 steps is a little too coarse, 28 is fine and 128 not a significant difference from 28. Changing between 14 steps and 28/128 steps is done with CV29. If you try to command a decoder configured for 14 steps in 28/128 step mode it won't run. If you command a decoder set in 28/128 step mode with 14 steps, it may run, but the lights will probably flicker. Changing between 28 and 128 speed steps is done at the command station. Digitrax uses what is called "status editing" to change how the command station talks to a decoder.
The downside of 28/128 step mode is that you have to click up or down through all those steps to abruptly change the loco speed. For example, if you detect an impending wreck, you'll want to stop the loco quickly. On the Digitrax throttle in 128 step mode, this might take 5.5 turns on the knob. This takes too long. In 28 step mode, it takes a little over one turn. The Digitrax throttle can use "ballistic tracking" to overcome this problem. If ballistic tracking is enabled (the default), the faster that you spin the knob, the faster it ticks through the speed steps. In 28 step mode, a fast jab at the knob with a thumb will get it to zero speed right away, even if the loco was running at full speed. In 128 step mode, you might have to jab at it twice. There is also an emergency stop button on the DT400 that will stop the commanded loco immediately.
If you use the radio throttle, ballistic tracking will feel a little different. When you make abrupt changes in speed, the throttle does not transmit all the intermediate steps in order to conserve battery power. It waits unit you've made up your mind and sends the final result only after things have settled down. After you spin the knob, there might be a slight delay before anything happens and then it all happens at once. If you turn the speed knob slowly, it will send each command and you an achieve smooth loco control.
Defaults. When the Chief is initially powered up, it defaults to 128 speed step mode. If you are trying to run a 14 step decoder, it won't run until you status edit that address to 14 steps. Once you've done that, the command station remembers the proper settings for that address until the backup battery in the command station is removed or until the settings are changed.
Status editing is a process of programming a limited set of attributes in the command station for each address. A 128 step decoder will run automatically in 28 or 128 step mode depending on how the command station speaks to it. Status editing allows you to tell the command station how it is to speak to any particular decoder.
Most new decoders come with a default address of 03 and some of them support only 14 speed steps. In order to avoid confusion, the command station defaults to 14 speed steps on address 03. I recommend leaving it that way and NOT using address 03 for any in service loco. Save that address for new decoders. Once you have verified that the decoder works, reprogram the address to your desired value and set CV29 to your desired operational mode and then status edit the new address as necessary.
Programming Decoders. The Chief can program any decoder any way that you want. There are four programming modes, but you'll probably use only two of them. Page mode is used on the programming track to program any CV. It has the advantage that it can read back data from the decoder to see what is actually there already. It does this by asking the decoder if a particular CV contains a particular value. The decoder sends an affirmative response by drawing a pulse of current. To search for the contents of a CV that is programmed to a high value, the command station has to keep asking questions until it gets an affirmative response or it runs out of values to try. This can take several seconds. During this time, the display shows a "pretzel" or a rotating segment on the right digit.
If the command station does not detect the presence of a decoder in page mode, it will display "no-d". If it detects the existence of a decoder but fails to read back good data, it will display "noPG". The usual cause of noPG errors is that there is a static load, such as lighting, that is drawing current from the programming track. Make sure that all loads that are not wired from the decoder are disconnected. If the decoder has a failed function output such that the function cannot be turned off, it will act the same way.
OPS mode is used on the main line to program any CV value EXCEPT the loco address. The advantage of OPS mode is that you can reprogram most CV values without moving the engine to the programming track. The disadvantage is that the command station usually cannot detect if a command was properly programmed nor can it read back CV values. OPS mode programming may not work with all decoders. I have been unable to program any CV in a Lenz LE230 in OPS mode with the Chief.
There are two other programming modes, "PHYS" and "dir", which use a different protocol to program a decoder. From the user's point of view however, all the modes are the same. Set the CV that you want to program and set the value and then send it. The command station figures out how to deal with the details. Some decoders will respond to some modes and not others. If you have programming troubles, try all four modes, one of them may work.
[ Top ]
A regular feature of DCC summaries is a table that compares various decoders. This page is no different except that I compare only decoders with which I have had some significant experience. These also are the largest in each manufacturer's family as they are the only ones really applicable to large scale locos. Also, instead of listing all the possible features, I list only the features that I find to be most important. If you want to see ALL the specifications of all the available decoders, see Digital Command Control and Large Scale.
 This is a picture of a Digitrax DG580L after it has been modified somewhat. The DG580L is nearly identical to the smaller DG380. The only difference is the rectifier case that sticks out of the end of the decoder. I have gone through five of these decoders. The first one worked. I had to try three times to get a second working decoder, two units in a row were DOA. The eventual second one and the third one eventually failed in a pair of RS-3's after some heavy hauling. I suspect that the failures were due to decoder overheating as the plastic shrink wrap had melted around the switches. Digitrax fixed both of them for free and they were eventually installed in smaller locos that draw less current. Over time, ALL of them have been replaced with better decoders as I was not satisfied with them overall.
This is a picture of a Digitrax DG580L after it has been modified somewhat. The DG580L is nearly identical to the smaller DG380. The only difference is the rectifier case that sticks out of the end of the decoder. I have gone through five of these decoders. The first one worked. I had to try three times to get a second working decoder, two units in a row were DOA. The eventual second one and the third one eventually failed in a pair of RS-3's after some heavy hauling. I suspect that the failures were due to decoder overheating as the plastic shrink wrap had melted around the switches. Digitrax fixed both of them for free and they were eventually installed in smaller locos that draw less current. Over time, ALL of them have been replaced with better decoders as I was not satisfied with them overall.
The Digitrax decoder has the richest accessory feature set of the types that I have used except for the NCE D408SR. The four special function generators can be applied to any function output EXCEPT F5 and F6. It has good motor speed control but it also generates the most acoustic motor noise by far due to its low PWM frequency. It also runs far and away the hottest of the ones that I have tried. Analog conversion of the DG580L is quite good and the function outputs can be programmed to respond in a fixed fashion when analog converted.
I have experienced some bizarre behavior of the DG580L that was not related to motor load. There are times when two of them just don't want to stop running. I'll turn the speed down to zero, and the engine will just drift along for 5 or 10 seconds before finally coming to a stop. Sometimes it won't actually stop at all. Another unit doesn't want to program reliably. Sometimes it'll respond properly on the programming track, and sometimes it'll return an error. Two of these units were returned to Digitrax and fixed at no charge. The third one I still have, it doesn't seem to worth the trouble to fix.
Eventually, Digitrax fixed that one too, but to no avail. I have three of these things, each one has blown up once and been fixed and then blown up again. That's 6 times that a DG580L has died where it should not have. I've never had another decoder of any kind fail for any reason.
 When I sent a flaky one back in for repair it was returned with a heat sink added. A gold plated sheet of metal has apparently been run back into the decoder to contact the tops of the switch FET packages to better heat sink them. I installed this one in an Aristo Pacific as a test. At least it didn't burn up right away but it's still hurting for output current capability. The engine would pull its assigned load, with some complaint, when wired for straight track power. However, with the new DG-580L, it would often just stall and hum like crazy while going nowhere. It's clear to me that the DG-580L really can't put out a lot of current. A Lenz LE230 that was in the same engine didn't do as well as with straight track power either, but it did MUCH better than the DG-580L and the LE230 is rated at half the current.
When I sent a flaky one back in for repair it was returned with a heat sink added. A gold plated sheet of metal has apparently been run back into the decoder to contact the tops of the switch FET packages to better heat sink them. I installed this one in an Aristo Pacific as a test. At least it didn't burn up right away but it's still hurting for output current capability. The engine would pull its assigned load, with some complaint, when wired for straight track power. However, with the new DG-580L, it would often just stall and hum like crazy while going nowhere. It's clear to me that the DG-580L really can't put out a lot of current. A Lenz LE230 that was in the same engine didn't do as well as with straight track power either, but it did MUCH better than the DG-580L and the LE230 is rated at half the current.
The DG580L has one unnerving tendency. If is not currently selected when it powers up and it doesn't hear any packets addressed to it, it won't wake up at all until it is specifically addressed. It can sit on powered track and appear to be completely dead, all functions are off. Once it receives any command directed to it, it'll wake up and the functions that were on when it last saw power will come on and it'll respond to motor controls. Don't panic if this happens, just send it a command. This can be interesting if you've forgotten the decoder address. In that case, place it on a programming track and make it to read back its address. Then put it back on the regular track and select it and it'll start to work.
 North Coast Engineering makes a decoder, the D408, with the highest average current capability of any of the large scale decoders. NCE uses Schottky barrier rectifiers to reduce the voltage drop and therefore the heat generated by the rectifier. I bought two D408's for use in the RS-3's that had smoked some Digitrax decoders. One of these was DOA but was repaired by NCE. They both handle the RS-3's at maximum load with no sweat. Even though the PWM frequency is low, there is little acoustic motor noise. It runs perceptibly warm pulling 15 cars on a grade, but nowhere near the temperature of the Digitrax decoder under load. One Digitrax decoder didn't even get to the same grade before it died with that same load. The D408 is a workhorse, but it isn't packed with accessory features. There is no reversing headlight. Analog conversion of the D408 is marginal at best. It runs, but it only goes in reverse no matter what the track polarity is and it has no ability to set function output states when analog converted. The NCE decoder will operate in 128 speed step mode, but then the acceleration and deceleration rates don't work so I run them at 28 speed steps.
North Coast Engineering makes a decoder, the D408, with the highest average current capability of any of the large scale decoders. NCE uses Schottky barrier rectifiers to reduce the voltage drop and therefore the heat generated by the rectifier. I bought two D408's for use in the RS-3's that had smoked some Digitrax decoders. One of these was DOA but was repaired by NCE. They both handle the RS-3's at maximum load with no sweat. Even though the PWM frequency is low, there is little acoustic motor noise. It runs perceptibly warm pulling 15 cars on a grade, but nowhere near the temperature of the Digitrax decoder under load. One Digitrax decoder didn't even get to the same grade before it died with that same load. The D408 is a workhorse, but it isn't packed with accessory features. There is no reversing headlight. Analog conversion of the D408 is marginal at best. It runs, but it only goes in reverse no matter what the track polarity is and it has no ability to set function output states when analog converted. The NCE decoder will operate in 128 speed step mode, but then the acceleration and deceleration rates don't work so I run them at 28 speed steps.
The latest D408SR decoders are silent running (16 kHz switching frequency) and seem to have all of the high current capability of its predecessor. It has 15 special lighting features available on all function outputs. It also has a reversing headlight. Analog conversion now works. The acceleration and deceleration rates now work in 128 speed step mode as does the Vmax, Vmid and Vmin settings. The decoder can also interpret a speed table in 128 step mode. The D408SR is pretty good, had back EMF and a random flicker special effect, it would be the best ever.
NCE tells me that the next version of the D408SR will have back EMF control and the random flicker effect will be added to the function generator. If all this stuff works, then the D408.next would clearly be the most capable decoder of any currently available.
 As of September 2002, NCE has released a much heftier decoder than the D408SR. The new one is the D808. It is essentially the same decoder as the D408, just with a bigger heat sink and much bigger components. Even though it doesn't have "SR" in the model number, it is silent running at 15.625 kHz. It does not have back-EMF motor control. There are 8 function outputs with 0.5 amp continuos and 2 amp surge capability on each output. Each function output can take one of 15 attributes such as a ditch light simulation.
As of September 2002, NCE has released a much heftier decoder than the D408SR. The new one is the D808. It is essentially the same decoder as the D408, just with a bigger heat sink and much bigger components. Even though it doesn't have "SR" in the model number, it is silent running at 15.625 kHz. It does not have back-EMF motor control. There are 8 function outputs with 0.5 amp continuos and 2 amp surge capability on each output. Each function output can take one of 15 attributes such as a ditch light simulation.
 The entire backside of the D808 is consumed by a metal heat sink. Under the heat sink are four 48 amp Schottky barrier rectifiers and four very large FET switches rated at 31 amps or better.
The entire backside of the D808 is consumed by a metal heat sink. Under the heat sink are four 48 amp Schottky barrier rectifiers and four very large FET switches rated at 31 amps or better.
 The Lenz LE230 has received very good reviews by other users. I bought one to put in an Aristo Pacific specifically because I wanted the back-emf motor control to keep it from running away on downgrades. See my Aristo Pacific Tips page for more details on that installation. This decoder is also not rich in features, but it does motor control very well, even without support for 128 speed steps. It makes the least acoustic motor noise of any of the "non-silent" decoders. This decoder also runs only slightly warm at the maximum load that the Pacific can handle. Analog conversion of the LE230 is very good but it does not allow function operation when analog converted. The LE230 was eventually replaced in the Pacific by a Zimo decoder because the LE230 really couldn't handle the full load of the Pacific. The Zimo (rated at higher current) was better, but it in turn was replaced by a D408SR which eventually did handle the motor load of the Pacific adequately.
The Lenz LE230 has received very good reviews by other users. I bought one to put in an Aristo Pacific specifically because I wanted the back-emf motor control to keep it from running away on downgrades. See my Aristo Pacific Tips page for more details on that installation. This decoder is also not rich in features, but it does motor control very well, even without support for 128 speed steps. It makes the least acoustic motor noise of any of the "non-silent" decoders. This decoder also runs only slightly warm at the maximum load that the Pacific can handle. Analog conversion of the LE230 is very good but it does not allow function operation when analog converted. The LE230 was eventually replaced in the Pacific by a Zimo decoder because the LE230 really couldn't handle the full load of the Pacific. The Zimo (rated at higher current) was better, but it in turn was replaced by a D408SR which eventually did handle the motor load of the Pacific adequately.
The LE230 has the option for the connection of an LP200 "slave" module. This is simply a decoder less the smarts. It has all the power conversion and motor driver circuits to drive another high current motor. It takes its control signal from the LE230 "master." It also has additional high current function outputs.
In reference to the LE230, Richard Brand writes: "If you want to use speed tables, be aware that CV81 is used by the decoder when computing 'intermediate' speed step 28 (from the average of CV80 and CV81). If CV81 is left at its default value (0) the loco will slow to about half speed when maximum speed is expected.
CV81 is not mentioned anywhere in the Lenz documentation - although the US Lenz web site does show a default value table, which has an unlabeled entry corresponding to where CV81 would be."
 MRC makes an inexpensive basic decoder, the AD320. This is a 2.5 amp basic decoder with four functions, just enough for a reversing headlight, bell and whistle. The decoder operates in 14 or 28 speed step mode and has some programmability. The main advantage is that it is cheap, it can be found for less than $30 and it'll handle a small single motor loco just fine.
MRC makes an inexpensive basic decoder, the AD320. This is a 2.5 amp basic decoder with four functions, just enough for a reversing headlight, bell and whistle. The decoder operates in 14 or 28 speed step mode and has some programmability. The main advantage is that it is cheap, it can be found for less than $30 and it'll handle a small single motor loco just fine.
The downside is that it makes almost as much motor noise as the Digitrax decoders and there are no special effects on the functions. It does analog convert, but it doesn't do it particularly well. At low track voltage, it has a hard time deciding if it should run or not.
 MRC released a newer, larger decoder sometime in the last few years, the AD322. However, I first found about them when they were being blown out at $11 each so I assume that when that batch is gone, there won't be any more. This one is rated at 8 amps and has sound of sorts. It has some limited special effects on the lighting outputs. It analog converts, but poorly. The decoder chops at 250 Hz, vs the 30 Hz of the AD320 so that it doesn't make as much noise as the AD320. It does make a singing sound as it runs, but it is a lot less obtrusive than the AD320.
MRC released a newer, larger decoder sometime in the last few years, the AD322. However, I first found about them when they were being blown out at $11 each so I assume that when that batch is gone, there won't be any more. This one is rated at 8 amps and has sound of sorts. It has some limited special effects on the lighting outputs. It analog converts, but poorly. The decoder chops at 250 Hz, vs the 30 Hz of the AD320 so that it doesn't make as much noise as the AD320. It does make a singing sound as it runs, but it is a lot less obtrusive than the AD320.
The bell and horn sounds are passible, the engine sound is poor. It seems to have just two speeds, idle and run 8. Fortunately, the engine sound can be turned off.
 After 15 months of waiting after returning the first one, I finally got the Zimo MX65S/N in working condition. This time, it worked fine and now is one of my favorite decoders just edging out the LE230 and just behind the D408SR. Even though it is a little smaller than the LE230, it is better heat sunk so it will handle transient loads better. Its back EMF control is better than the LE230 as it can be fine tuned to allow the loco to MU with other locos and minimize bucking. The MX65S/N can also be programmed to operate at a switching frequency of 16 kHz which is nearly silent. I can still hear the thing with one particular motor, but only if I stick my ear right near the motor. When the back EMF is active, there is an audible buzz that occurs because the power is shut off momentarily to sample the back EMF. The PWM frequency can also be adjusted. Set it to 30 Hz like some of the other decoders and you can hear some REAL motor noise.
After 15 months of waiting after returning the first one, I finally got the Zimo MX65S/N in working condition. This time, it worked fine and now is one of my favorite decoders just edging out the LE230 and just behind the D408SR. Even though it is a little smaller than the LE230, it is better heat sunk so it will handle transient loads better. Its back EMF control is better than the LE230 as it can be fine tuned to allow the loco to MU with other locos and minimize bucking. The MX65S/N can also be programmed to operate at a switching frequency of 16 kHz which is nearly silent. I can still hear the thing with one particular motor, but only if I stick my ear right near the motor. When the back EMF is active, there is an audible buzz that occurs because the power is shut off momentarily to sample the back EMF. The PWM frequency can also be adjusted. Set it to 30 Hz like some of the other decoders and you can hear some REAL motor noise.
This one does almost everything but it doesn't have special effects on the functions. The decoder analog converts smoothly with either DC or PWC on the track however there is audible motor hum when it is analog converted. Also, while analog converted, only the reversing headlight function operates, the other functions are off.
 After several years of using NCE and Zimo decoders, I tried a new version of a Digitrax decoder, the DG383AR. This is a plug and play configuration designed to go right into AristoCraft plug and play sockets. The DG383AR 3 amp decoder was recommended for the AristoCraft RDC. It did work and the design is significantly improved over the DG580L. This one is silent running, has back-EMF control and has lots of effects that can be applied to the function outputs. There is a also two larger 5 amp versions, the DG583AR (for AristoCraft) and the DG583S (screw terminal) for generic installations.
After several years of using NCE and Zimo decoders, I tried a new version of a Digitrax decoder, the DG383AR. This is a plug and play configuration designed to go right into AristoCraft plug and play sockets. The DG383AR 3 amp decoder was recommended for the AristoCraft RDC. It did work and the design is significantly improved over the DG580L. This one is silent running, has back-EMF control and has lots of effects that can be applied to the function outputs. There is a also two larger 5 amp versions, the DG583AR (for AristoCraft) and the DG583S (screw terminal) for generic installations.
 The QSI Magnum is a combination motor and sound decoder. It does quite well with both and is cost effective for an installation that already has neither. The decoder is configured for the AristoCraft plug and play socket, but can be ordered with an adaptor board that provides screw terminals. The sound is excellent and well coordinated with the motor speed. The decoder is extremely programmable, either with a command station or a computer programmer and new sound files are uploadable via the computer programming interface. The sound portion is clearly the most complete and customizable of any digital sound system that I have seen. The whole assembly handles dirty track quite well with about 0.2 seconds of carryover, enough so that the decoder doesn't tend to reset due to power drop outs as many of the other sound decoders do.
The QSI Magnum is a combination motor and sound decoder. It does quite well with both and is cost effective for an installation that already has neither. The decoder is configured for the AristoCraft plug and play socket, but can be ordered with an adaptor board that provides screw terminals. The sound is excellent and well coordinated with the motor speed. The decoder is extremely programmable, either with a command station or a computer programmer and new sound files are uploadable via the computer programming interface. The sound portion is clearly the most complete and customizable of any digital sound system that I have seen. The whole assembly handles dirty track quite well with about 0.2 seconds of carryover, enough so that the decoder doesn't tend to reset due to power drop outs as many of the other sound decoders do.
Of these types, few of them are "just right." MRC, Zimo, the NCE D408 and Lenz lack special effects on the function outputs and the older Digitrax which does have good special effects can't handle the high loads and makes lots of noise. Soundtraxx makes combined DCC decoders and sound units, but theirs do not support analog conversion or high current as the 3 amp version is yet to be released. The D408SR has special effects on all functions, but doesn't have random flicker. The D408SR doesn't have back EMF control. The newer Digitrax decoders seem to work better. The DGx83xx series seem to do it all well, except that they don't do sound. These decoders are a little bigger than the others and don't fit in all places that a Zimo or D408SR will.
I like the Lenz LE230, Zimo MX65S/N, Digitrax DG583S and NCE D408SR decoders. The LE230 fits where some of the others won't (it is thin) and is relatively inexpensive. The Zimo has more programmable back EMF control than LE230 and works better is some instances. It has a little more current capability and better heat sinking but it is thicker and may be more difficult to squeeze into tight spots. The D408SR excels in pure grunt power and has special effects available on all of its function outputs. It's a little thicker than the LE230 but thinner than the Zimo MX65S/N. It also seems to run cooler than the other two.
| Feature | Digitrax
DG580L |
Digitrax
DG383AR |
NCE
D408 |
NCE
D408SR |
NCE
D808 |
Lenz
LE230 |
MRC
AD320 |
Zimo
MX65S/N |
QSI
Magnum |
|---|---|---|---|---|---|---|---|---|---|
| Average Current (Amp) | rated at 5
2-3 in practice |
3, 5 for the DG583AR and DG583S | 4 | 4 | 8 | 2.5 | 2.5 | 3 | 3 |
| Peak Current (amp) | rated at 8 but
is probably less |
8 | 11 | 11 | 30 | 7.5 | 5 | 5 | not specified |
| # of Functions | 8 | 8 | 8
F7 requires soldering to the board |
8
F7 requires soldering to the board |
8 | 8 | 4 | 8 | 2
more with external adaptor board |
| # of Special Effects | 4 | 8 | None | 15 effects available on each of the 8 functions | 15 effects available on each of the 8 functions | None | None | None | several |
| Reversing Headlight | Yes | Yes | No | Yes | Yes | Yes | Yes | Yes | Yes |
| Back EMF Motor Control | No | Yes | No | No | No | Yes | No | Yes
Programmable |
Yes
Programmable |
| Acoustic Motor Noise | High | Low | Low | None | None | Low | High | Very Low
(back EMF chopping only) |
Very Low |
| Speed Steps | 14/28/128 | 14/28/128 | 14/28/128 | 14/28/128
Headlight may be inoperable at 14 speed steps |
14/28/128
Headlight may be inoperable at 14 speed steps |
14/28 | 14/28 | 14/28/128 | 14/28/128 |
| Analog Conversion | Yes | Yes | Marginal | No | Marginal | Yes | Marginal | Yes | Yes |
| Function Operation when Analog Converted | Yes | Yes | No | N/A | N/A | No | No | Headlight only | Yes |
| Operating Temperature at High Load | Gets hot | warm | warm | warm | warm | warm | TBD | warm | warm |
| Approx. Cost (discounted) | $52 | $52 | $65 | $80 | $110 | $70 | $30 | $65 | $145 |
| Warranty | 60 Days | 60 Days | 3 Years | 3 Years | 3 Years | 10 year limited | 1 year | 1 year | TBD |
| Repair Cost for User Caused Failures | $17 | $17 | Free for 1 Year | Free for 1 Year | Free for 1 year | Free for 1 year | Std Charge | Variable | TBD |
If I could stir all the existing decoders in a pot and come out with one that has all the best features of the existing decoders, it would be something like this:
As of Feb 2001, the one that comes closest is the NCE D408SR. In head to head tests in demanding applications, it clearly does the best job of high current motor control, a DCC decoder's main function. Further, the D408SR may get better. NCE tells me that they will be incorporating back-EMF, a random flicker function generator at some future date. It is, however, the 2nd most expensive but since it's only $10 more than the Zimo, it is probably worth it. The D808 is also a winner, but it comes at extra cost. If you need to equip a USA Trains loco, the extra $30 may be worth it to avoid a toasted decoder.
As of 2008 and things have changed somewhat. Digitrax has gotten it's act together and the DG583S (G=large scale, 5 amp, 8 functions, S=screw terminals) seems to be a pretty good decoder all around. I haven't totally beat up on the motor current capability yet, but even the 3 amp version in the RDC provides sufficient power to drag 16 heavy cars up a grade without getting more than warm. Further, it is by far the least expensive of the high performance decoders.
Lenz has a new line of decoders, the Gold Series, which are claimed be top notch. I have no experience with these, but one feature that looks interesting is that an optional power storage assembly can be connected to the decoders to help them ride over dirty track. However, under my conditions, this doesn't seem to be necessary as virtually all of the decoders listed handle moderately dirty track pretty well as long as there are a sufficient number of wheels picking up power. Lenz has an economic problem now as the dollar is weak against the Euro so the Lenz decoders are pretty expensive.
Since I'm writing this page, I get to editorialize as much as I want. After playing with all of the decoders listed above, I have elected to rank them. The opinions expressed below are entirely those of the author.
You might also notice that the ranking and the cost go together as well. In the case of these decoders, you truly do get what you pay for.
| Rank | Decoder | Pros | Cons | Discounted
Cost |
Analyst's
Recommendation |
|---|---|---|---|---|---|
| 1 | Digitrax 3 Series
DG383AR DG583AR DG583S |
Strong Motor Driver Silent running Special effects on all outputs Low Operating Temperature |
$48-$55 | Strong Buy | |
| 1 | NCE D408SR |
Very Strong Motor Driver Silent running Excellent special effects on all outputs Low Operating Temperature Good Analog Conversion |
No Back EMF (yet) No random flicker function (yet) |
$80 | Strong Buy |
| 1 | NCE D808 |
Extremely Strong Motor Driver Silent running Special effects on all outputs Low Operating Temperature |
No Back EMF (yet) No random flicker function (yet) |
$110 | Strong Buy provided that you REALLY need all the power. Most locos do not need this decoder, USA Trains locos do. |
| 2 | QSI Magnum |
Excellent Back EMF Control Excellent sound Plug and Play in some locos Extreme programmability Silent Running Strong Motor Driver Fair Analog Conversion Low Operating Temperature Lowest cost for decoder AND sound together |
Large volume in the generic version Can be difficult to install the generic version due to it's size Only 2 functions, headlights, without an additional adaptor |
$145 in the generic version $128 in the PnP version |
Strong Buy |
| 2 | Zimo MX65S/N |
Excellent Back EMF Control Silent Running Strong Motor Driver Good Analog Conversion Low Operating Temperature |
No Special Effects |
$70 | Strong Buy |
| 3 | Lenz LE230 |
Good Back EMF Control Strong Motor Driver Good Analog Conversion |
No Special Effects Audible Motor Noise |
$60 | Buy |
| 4 | Digitrax DG580L |
Excellent Special Effects Quality Excellent Analog Conversion |
Wimpy Motor Driver High Operating Temperature High Motor Noise Special effects available on only 4 outputs |
$52 | Sell |
| 5 | MRC AD320 |
Inexpensive |
Weak Motor Driver High Acoustic Noise No Special Effects Poor Analog Conversion |
$30 | Sell |
[ Top ]
The NMRA has gone to considerable lengths to define the DCC standards such that the various manufacturers can design and market equipment that is "compatible." There are standard test methods defined and "warrants" are issued when a particular piece of equipment is found to be compatible with the standards. The extent of the resultant compatibility is not yet perfect however. A manufacturer can screw up, they can be incompatible by intent (usually to allow some new feature that isn't in the standards) or an incompatibility can be missed. There is so much equipment available now that it is impractical to test each new piece with every existing piece. That extensive testing is left to us. Eventually we will find the problems. It is important to report odd behavior to the manufacturers so that it can be verified and hopefully fixed.
Some of the manufacturers complain about political problems with the testing and have stopped submitting equipment for testing. I don't have any real idea what is actually going on, but the compliance testing system seems to be less than perfect.
I have discovered several problems related to compatibility with the limited variety of equipment that I have. I have an unusual knack of breaking hardware and software by trying to make them do things that the designers didn't intend or foresee. I push everything pretty much to or beyond the limits.
The following list is short and I hope it stays that way, however somehow I think that I'll find more problems over time.
The NCE D408 decoder does not analog convert properly. The manufacturer admits that his design is weak in this area. This has been fixed in the newer D408SR. Since I once had my command station burn up, I have experienced the pain of having DCC equipped engines stand idle because they cannot convert to regular track power properly. Soundtraxx decoders do not analog convert at all.
The Lenz LE230 and the Digitrax Chief do not get along outstandingly well. The Chief cannot program the LE230 in OPS mode on the main as it should. Also, my original Chief had problems controlling functions F5 and F6 of the LE230. I had to send my Chief back for repair once, and it was replaced. The new one is able to control the LE230's F5 and F6 so I suspect there was a ROM problem in the older Chief that had already been corrected in newer versions.
None of the decoders use the same wire colors for function outputs. This should be standard, but it obviously isn't. I was distressed to find that while Digitrax and MRC use the same wire colors, they reverse the function of the green and purple wires. NCE uses their own scheme but on the D408 most of the wires are brown. You have to count them on the connector header to determine which is which. The header on the D408SR is color coded. NCE and Digitrax use the same connector for the function wires, but the pin assignments are completely different.
Most manufacturers count the total number of function outputs in their advertising as a feature. However, the reversing headlight usually consumes two of those functions so that an 8 function decoder will really do 7 independent things. The headlight function is usually labeled F0(F) and F0(R) and counts as two functions. The NCE D408 doesn't provide a reversing headlight so it can do 8 independent things. The D408SR has been enhanced to use one of the outputs as a reversing headlight but that output can also be used for other things by remapping the way that the functions are controlled.
Zimo and Lenz have chosen to number their functions starting at 1 instead of at 0. NCE tends to number functions starting at 0, but the wires associated with those functions are numbered starting at 1. Your command station will still control everything properly, you just have to be careful when you wire it to add 1 to each command station function number to identify the right pin or output wire. The NCE function outputs are numbered from 1 to 7 with the 7th output being the reverse headlight which is slaved to function 1.
Some versions of the DT100 throttle have troubles programming CV119 and CV120 on the NCE D408SR. CV119 is important as it enables the special function effects. CV120 sets the special effect on the first function output which is usually used for the front headlight. These problems do not occur in the new DT300 and DT400 throttles. Programming of the special effects works fine on the newer throttles.
The DCC standards allow three commanding formats for decoders. These are 14, 28 and 128 speed step modes. Decoders that can handle all three automatically will interpret commands correctly no matter how they come to it. However, decoders that cannot interpret the higher speed step modes will be deaf to commands in those formats. If your command station defaults to 128 step mode, decoders like the LE230 will sit there like a stone unless you talk to them properly. This is done at the command station via a process called Status Editing (at least in Digitrax speak). You may have to tell the command station how to format commands for some decoders or they will just not work. Refer to the documentation for your command station to set it up properly.
The DG583S is really just a screw terminal version of the DG583AR that was designed to go into the plug and play socket of recent AristoCraft locomotives. There is also a 3 amp DG383AR that will work in most locos, the DG583AR is intended for the 4 motor locos. According to Digitrax, AristoCraft reversed the headlight wiring on their plug and play socket. When the screw terminal version was created, Digitrax apparently carried over this reversal of the headlights so that in a non-plug and play installation the lights are also reversed in conflict with the documentation that comes with the decoder. There are two ways around this. During installation, reverse the white and yellow wires. After installation, remap the functions of the white and yellow wires with CV33 and CV44. Set CV33=2 and CV34=1 and the same reversal will be done electronically.
The QSI Magnum is also a plug and play decoder but installed on an adapter board to provide screw terminals for more generic installations. It also has a headlight issue. The documentation for the screw terminal assignments of the headlights conflicts with the stencil that is on the adaptor board. The adaptor board appears to be correct.
The DG580L decoders are the oldest that I have. There were originally 3 working versions (2 were DOA and replaced by Digitrax). Each had apparently failed at least once and been repaired. All three are flakey. They cannot stand noise on the DCC signal. In a loco with dirty wheels, or if they are standing on track where several volts of noise is impressed on the DC signal (from other locos running on the same track far from the booster), they will loose their minds and appear to fail. They may still respond to function commands but not drive the motor. They may just chug along at some speed without the ability to change the speed. The decoders will still respond properly on the programming track but they just won't work. For some reason, all I need to do is push their address (or any address) back at them via the programming track or via OPS mode and they will pick up again and start to work. But expose them to some noise again and they will flake out. This may be due to poor design or just age, but all three of the do exactly the same thing.
[ Top ]
This section is written primarily for my own benefit. I continually misplace the instructions that come with the decoders. These are needed to identify the wiring. In an effort to get organized, I've collected all the instruction sheets into a notebook AND reproduced the connections here. Since the manufacturers number the pins differently, I've chosen to use the Digitrax standard with the first function number starting at F0. These numbers will then correspond to the function numbers on a Digitrax throttle. The connections are either identified by pin number or wire color as appropriate. In the case of the D408 where many of the wires are brown, you have to refer to the diagram below the table. The left and right rail are per large scale standards which are reversed from the HO standards that the manufacturer's documentation typically use.
| Decoder | Left Rail | Right Rail | Motor + | Motor - | Function Common | F0(F) | F0(R) | F1
(Bell) |
F2
(Horn) |
F3 | F4 | F5 | F6 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DG580L | Red | Black | Orange | Gray | Blue (heavy)
Blue (light) |
White | Yellow | Green | Violet | Brown | White/ Yellow | White/ Green | White/ Blue |
| D408 | Red | Black | Orange | Black | Blue (2 ea) | White | n/a | Green | Violet | Brown1 | Brown1 | Brown1 | Brown1 |
| D408SR | Red | Black | Orange+ | Gray | Blue (2 ea) | White | Yellow | Green | Violet | Brown | White/ Yellow | White/ Green | n/a |
| D808 | Track1 | Motor1 | Motor1 | Track1 | Common
(2 ea)1 |
F11 | F21 | F31 | F41 | F51 | F61 | F71 | F81 |
| MX65S/N | 22 | 12 | 42 | 32 | 5, 16 | 6 | 11 | 14 | 13 | 7 | 9 | 12 | 8 |
| AD320 | Red | Black | Orange | Gray | Blue | White | Yellow | Violet | Green | n/a | n/a | n/a | n/a |
| LE230 | G13 | G23 | M13 | M23 | U+3 | L13 | L23 | Yellow | White | Black | Red | Gray | Orange |
Notes:
Each output of a decoder has a rated current. For function outputs, these are usually PEAK ratings. Don't exceed them. Just because a decoder manufacturer CLAIMS that any given decoder can handle a certain amount of current, that does not make it true. The ratings are in amps. Generally, decoders are rated for total current. Current drawn by functions must be subtracted from the motor rating to achieve the net motor rating.
| Decoder | Total | Motor (average) | Motor (peak) | F0(F) | F0(R) | F1 | F2 | F3 | F4 | F5 | F6 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| DG580L | 5 | 5 (less in practice) | 8 | 1 | 1 | 0.2 | 0.2 | 1 | 0.2 | 0.2 | 0.2 |
| D408 | 4 | 4 | 11 | 0.081 | 0.081 | 0.081 | 0.081 | 0.081 | 0.081 | 0.081 | n/a |
| D408SR | 4 | 4 | 11 | 0.081 | 0.081 | 0.081 | 0.081 | 0.081 | 0.081 | 0.081 | n/a |
| D808 | 10 | 8 | 30 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 |
| MX65S/N | 3 | 3 | 5 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| AD320 | 2.5 | 2.5 | 5 | not rated | not rated | not rated | not rated | n/a | n/a | n/a | n/a |
| LE230 | 2.5 | 2.5 | 7.5 | 0.3 | 0.3 | 0.5 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
Notes:
[ Top ]
In general, I've found that DCC is reasonably tolerant of dirty track, up to a point anyway. When the track condition is fair to good, DCC is quite reliable. However, when the track condition begins to degrade into the really dirty state, DCC takes a rapid crap. Under these conditions, especially with small locos with maybe only 4 wheels picking up power, DCC gets unusable while conventional track power still sort of works.
Even with larger locos with 8 or more power pickup points, dirty track can sometimes be a problem. I find that operations are SIGNIFICANTLY improved when I run two locos in a MU consists AND I have cross wired the track power pickups between them. Most times, I tend to run MU primarily for this reason. On passenger trains that already have power pickups for lighting, I cross wire power down the whole length of the train such that the engine can run from power picked up by any wheelset right to the last car. Wired this way, these trains will run on track that is incredibly dirty and the lights won't even flicker.
I put a decoder into an LGB 2060 industrial diesel and I found that it ran very poorly. I hadn't cleaned my track on purpose for several months as I had been testing DCC against regular track power with large locos. When I put this little loco on the track, it spit and sputtered horribly and wouldn't run 2 feet without stalling completely. This was a problem. It is true that its wheels were dirty, the track was dirty and the sliders were completely worn out and packed with crud, but I expected miracles.
I have worked out a scheme to carry a little on board power in a big capacitor (sometimes known as a BFC). Capacitors have nothing like the energy storage capacity of a battery, but they don't wear out very fast and don't need special charging circuits.
This method seems to work. The engine would not even run when the capacitor is not connected. With the capacitor connected, the engine runs MUCH better, although still not perfectly. There is no complete substitute for clean track in a DCC system, but this gets close.
When the engine looses contact with the track, the capacitor begins to discharge and the voltage drops. The engine will continue to run slower until the engine hits some good track again. At that point, the decoder voltage rises immediately and the capacitor begins to recharge as fast as practical. If the engine hits bad track in the few hundred milliseconds that it takes the capacitor to fully recharge, it'll slow again.
Based on subjective results, it appears that capacitors in the range of 10,000 micro farads provide an improvement. Larger capacitors in the range of 50,000 micro farads work a little better. Adding more doesn't seem to help much.
The schematic above shows what is needed to modify a DCC decoder to accept external charge storage FAR beyond what the decoder designer intended. Very high density electrolytic capacitors are available now for about $10 to $20 that have a capacity of 47,000 to 100,000 micro farads at 25 volts. These capacitors are typically 35 to 50 mm (7/8 to 1.25") in diameter and up to 80 mm (2") long. Room can usually be found even in a small loco for a part like this. This capacitor can store a second or so of run time which can get a loco across most bad spots with maybe a little slowing as the capacitor discharges.
The 3 ohm resistor is critically important. It limits the peak charging current so that the otherwise nearly instantaneous charging current of the capacitor is limited to a value that will not blow up the decoder rectifier, will not pit the wheels and track, and will not freak out the DCC booster. The diode is there to allow the capacitor to discharge back into the decoder without suffering the voltage drop caused by the resistor. A Schottky barrier rectifier will work marginally better here than a conventional silicon rectifier.
 Since the ultra dense parts hadn't arrived, I did most of my experimentation with somewhat less dense computer grade electrolytic capacitors that I found in the bottom of one of my electronics junk boxes. This part is a little too big to package in any loco, but it served to work out the method. This particular part has a capacitance value of 66,000 micro farad. I also hauled around a digital voltmeter to monitor the state of charge of the capacitor.
Since the ultra dense parts hadn't arrived, I did most of my experimentation with somewhat less dense computer grade electrolytic capacitors that I found in the bottom of one of my electronics junk boxes. This part is a little too big to package in any loco, but it served to work out the method. This particular part has a capacitance value of 66,000 micro farad. I also hauled around a digital voltmeter to monitor the state of charge of the capacitor.
I don't know of any decoder manufacturer that recommends this modification so if you do it, you can write off the decoder warranty. The blue wire is usually the raw internal positive bus, but the internal negative bus is rarely brought to the outside. I had to cut the shrink tubing slightly on this Digitrax decoder to expose the plus and minus terminals of the bridge rectifier so that I could attach the wires to the charge storage circuit.
Also, this modification can tend to impact how the loco responds on the programming track. Since power is provided to the programming track in pulses and through a current limiting resistor, the capacitor may not allow the internal decoder voltage to reach proper levels during the programming pulse. You may have to disconnect the capacitor while using the programming track. OPS mode programming will work fine however.
I ran some tests on the loco configured as in the picture above to see how far it would go after it crossed over onto completely dead track. This engine is equipped with a Digitrax DG580L. I choose a straight and level section that a double block roughly in the middle. I turned off one section and allowed the engine and trailing flat car to run past the break so that I could measure how far it would go before rolling to a stop. The distance recorded is the distance from the break to where the rear wheels stopped. I tested it with three levels of charge storage, zero, 6,800 uF and 66,000 uF. In all cases both capacitors were on the flatcar so that the trailing weight didn't change. I also tried it with various combinations of CV values and two forms of track power. Since my source of PWC and DCC are completely different, I did check to see that the initial speed of the engine was the same with both sources of power. To within 1%, it was the same.
|
|
|
CV effect |
|---|---|---|
|
|
|
analog mode conversion enabled |
|
|
|
analog mode conversion disabled |
|
|
|
instant deceleration rate |
|
|
|
very long deceleration rate
approximately 20 ft |
| Power Source | CV Values | Capacitance | ||
|---|---|---|---|---|
|
|
|
|
||
| DCC | CV29=06
CV4=00 |
|
|
|
| CV29=02
CV4=00 |
|
|
|
|
| CV29=06
CV4=07 |
|
|
|
|
| CV29=02
CV4=07 |
|
|
|
|
| PWC | CV29=06
CV4=00 |
|
|
|
| CV29=02
CV4=00 |
|
|
|
|
| CV29=06
CV4=07 |
|
|
|
|
| CV29=02
CV4=07 |
|
|
|
|
What does this all mean anyway? Well, first thing is that not much effects how far the loco will coast except the value of the stored charge. Momentum settings and potential conversion to analog once the DCC signal is lost doesn't seem to have much to do with it. The message is that bigger capacitors allow the engine to run on longer without power and without communication with the command station. With no capacitance, the distance traveled was mostly due to inertia as the engine actually slid to a stop.
During actual tests on the railroad with no extra capacitance, the engine would stall inside a foot due to the extremely dirty track. With the 6,800 uF capacitor, the engine ran, but there were noticeable changes in speed and an occasional stall when the engine didn't find enough net charge to keep running and it just ran down. With the 66,000 uF capacitor, the engine ran pretty well. After the track was cleaned, the engine ran perfectly. I should note that I was also running an RS-3 with an NCE D408 decoder in it on the same dirty track and it ran fine due to the extra wheels providing power pickup. The little LGB engine ran about the same without the capacitor (terrible) on the dirty track with either an NCE or a Digitrax decoder in it.
Even with all this work this engine's performance with DCC just didn't meet my expectations. I removed the DCC equipment and the engine became somewhat more tolerant to dirty track. I would appear that DCC is more suited to larger locos with better power pickup. In the future, I'll use DCC for the larger current hungry stuff for its precise control, virtually unlimited power and auxiliary function control. The smaller stuff will be left track powered or converted to battery power. A set of high performance batteries will drive a small loco well enough with the relatively light loads that this kind of loco can handle. Further, it will still coexist with the DCC stuff and it could run on track with any kind of power.
10 years after that initial experimentation and four battery/RC conversions later, I have reversed course again. All four of those locos have been converted back to DCC in addition to the battery RC equipment that was already there. There are a few of reasons for this change.
The biggest problem with battery RC was that the batteries always self-discharged while on the shelf and were rarely in a condition to run when I wanted to run them. I never did figure out a way to determine a day in advance that I was going to run one of them in order to charge it so that it would be ready. I didn't keep them on trickle charge because that is hard on batteries when they are kept on charge for months on end.
My track cleaning method (pole sander with drywall screen) has materially improved such that it is easy to keep the track much cleaner than it was. I built a track cleaning car that drags along a pole sander head and drywall screen too. This car is very effective.
Another reason is that the design of DCC decoders has materially improved beyond the Digitrax DG580L and original NCE D408 such that the locos themselves are much more tolerant to dirty track. When they loose and regain power now, the decoders reset and respond much more quickly so that even a badly flickering headlight doesn't (indicating poor track contact) does not actually impact the operation of the decoder much.
Now even a very small and lightweight loco, such as a USAT Speeder runs well on DCC.
[ Top ]
Many newer DCC decoders come with sound integrated into the decoder. These systems work very well and can do things that a separate decoder and sound board combination cannot do. For a new installation where sound is contemplated, these modern sound decoders are the way to go. QSI, ESU and Soundtraxx among others make integrated sound and motor decoders that work and sound very well. However, separate boards can work out well and be very cost effective when a loco that has acceptable sound already is converted to DCC.
Most DCC decoders have function outputs that can be used to control sound systems. With Digitrax systems, at least, function F1 is usually reserved to control a bell and function F2 is reserved for a whistle or horn. Most function outputs latch on, however F2 is unique. F2 is active only while the function button is pressed allowing a whistle or horn to be "played" if the sound system allows it.
DCC functions outputs are virtually always open collector type switches. A transistor (bipolar or FET depending on the manufacturer) turns on to connect the function output pin to the internal ground of the decoder. Power for the device to be controlled by the function output is usually supplied by the "blue" wire. This wire is connected to the internal DC power bus of the decoder, usually about 20 volts. This works well for accessories, such as lights, that can be completely disconnected from their original wiring and run directly from the decoder. Sound systems are a little different. They are not easily disconnected from everything else and are usually designed to be triggered by a reed switch.
Most standalone sound systems can be triggered by function controls of DCC decoders. Sometimes, it is possible to directly connect the function output of a DCC decoder and a trigger input of a sound system. Sometimes it isn't possible and some form of isolation (usually a device called an optical isolator) is necessary to interface them.
If you ever wondered how it is possible to trigger a sound effect with only one wire connected between a decoder and a sound trigger, the following schematic shows how it is done. The current path for the command is shown in the dark arrows. There really are two connections, the hidden one is back through the track. Since both systems have bridge rectifiers, they have a "virtual" ground in common between them. The internal grounds of the sound system and the decoder are not actually connected, but are at nearly the same potential because they are hooked up the same way. The decoder does not know that the current that its function output is sinking to ground does not come from its own power supply, but instead from the power supply in the sound system. The sound system doesn't know that the trigger signal isn't shorted to its own internal ground, but to the internal ground of the DCC decoder.
This trick can work and it is often used, but it can also fail. If your sound system maker hasn't tested his system with the decoder that you intend to use, you may fry one or both of the systems unless you know exactly what you are doing. Also, since the systems rely a virtual ground, there is no guarantee that those two grounds will have exactly the same potential at all times. Even though Dallee claims that their sound system can be connected to a decoder this way, random noise or other transients often interfere and causes their whistle to blow when it should not.
 However, this problem is easy to fix. If you are not sure about the safety of a direct connection or a direct connection does not work, then use of a cheap device called an optoisolator will make it work. An optoisolator is a device that contains an LED that shines on a photo transistor. Light on the photo transistor generates photo currents in the base of the transistor that act just like current injected into the base, turning the transistor on and making it act like a closed switch. With no current in the LED, there is no light and the photo transistor turns off, like an open switch. There is no electrical connection between the LED and the photo transistor so that no real current can flow between the two, hence creating electrical isolation, while allowing signals to flow "through" the device. The 1K resistor limits the current in the LED to less than 20 mA, enough to get a strong signal through the device without burning out the LED. The output current sinking capability is usually about 10 mA, enough to trigger any sound system. Almost any bipolar or Darlington output optoisolator will work in this application, use whatever you can find in your area. I use devices called the NTE 3040, 3041 and 3044 depending on what I can find. The most generic part number for a suitable optoisolator is a 3N25.
However, this problem is easy to fix. If you are not sure about the safety of a direct connection or a direct connection does not work, then use of a cheap device called an optoisolator will make it work. An optoisolator is a device that contains an LED that shines on a photo transistor. Light on the photo transistor generates photo currents in the base of the transistor that act just like current injected into the base, turning the transistor on and making it act like a closed switch. With no current in the LED, there is no light and the photo transistor turns off, like an open switch. There is no electrical connection between the LED and the photo transistor so that no real current can flow between the two, hence creating electrical isolation, while allowing signals to flow "through" the device. The 1K resistor limits the current in the LED to less than 20 mA, enough to get a strong signal through the device without burning out the LED. The output current sinking capability is usually about 10 mA, enough to trigger any sound system. Almost any bipolar or Darlington output optoisolator will work in this application, use whatever you can find in your area. I use devices called the NTE 3040, 3041 and 3044 depending on what I can find. The most generic part number for a suitable optoisolator is a 3N25.
Getting voltage controlled functions to work from a DCC decoder can be considerably more difficult. Most sound systems can be connected to the motor output of a DCC decoder and they'll work fine. However, then they also have to charge their batteries and run their amplifiers from the motor output of the decoder as well adding load to the decoder which it may not appreciate. Sound systems that have battery charging problems when running from track power will have pretty much the same problems when wired this way. They may do somewhat better due to the PWM input voltage which gives them a chance to charge during extended running at low speed, but they still will eventually discharge their batteries.
The Soundtraxx Sierra, in particular, is REALLY picky about its connections. The Sierra requires that the voltage at its input pins be nearly zero before it will recognize that the train has stopped. Both the differential signal between the pins AND the common mode signal from either pin to "ground" must be within a few millivolts of zero when the loco is stopped or it won't work right. It is the common mode signal that is the hardest to deal with because the internal ground voltages of the Sierra and most DCC decoders don't match up well enough.
Soundtraxx offered a recommendation on how to connect a Sierra to a DCC decoder in their Technical Note #7. I've tried it this way with Digitrax, Lenz and Zimo decoders and it hasn't worked quite right. In the usual case, the directional horn signals get messed up. In the worst case, the voltage controlled effects hardly work at all. I've never used a Phoenix so I don't know what problems it may have with DCC. The PH Hobbies (Aristo) digital sound system didn't work well directly connected to a decoder. Even the Dallee system, which is designed to work with DCC, had occasional problems.
After some considerable effort, I've solved the problems with each of these sound systems with the addition of some degree of custom circuitry and usually a whole pile of optoisolators. Details of each decoder/sound system combination that I've dealt with can be found at other pages in this web site. Look at the table in the next section for the combinations that I have worked out.
Many newer sound systems are directly compatible with DCC or are integrated into a DCC motor decoder. The ones that come as a combined motor and sound decoder seem to work the best because they are usually easier to program and the sound and motion tend to be better coordinated. The ESU LokSound decoders have the best coordination that I've yet seen. The sound and the motor are so locked together that it is virtually impossible to make the loco move or stop such that it gets out of step with the sound. An integrated sound/motor decoder with BEMF can also change the sound based on the actual load on the motor. The BEMF system knows how hard it has to work to maintain motor speed so that it can change the sound to be louder or softer depending on if the loco is really pulling or just drifting at speed. QSI decoders implement this "sound of power" better than anybody.
There are several stand alone sound systems that accept DCC commands as inputs to control the sound. All current Phoenix models, Digitrax sound decoders, and the Soundtraxx DSX decoders accept the DCC signal itself for guidance of what to do. These separate sound decoders cannot know the actual loads on the motor or what the motor decoder is doing so that both decoders often require some "tuning" to get the sound to match the speed. Steam systems often will accept a chuff switch input so that at least the chuff can match the speed well but diesel type systems just have to guess.
I've used dual decoders in several locos as that is what was available at the time. To make the sound and motor decoders independently programmable so that their operation can be tuned in OPS (on the main) programming, some simple tricks might be necessary.
One way is to assign the two decoders different addresses and consist them together for operation. I usually set the sound decoder as the "top" or primary address so that the function buttons will act on that decoder. This allows sounds to be played more easily. When it is time to program the decoders, both the motor and sound decoders can be programmed independently at their respective addresses while the consist is running so that I can see exactly what is happening as I program them.
Another way is similar, each decoder gets a different 4 digit address and they are consisted together as before for the purposes of programming. However each decoder gets the SAME 2 digit address for the purposes of running. To switch between programming and running modes, CV29 needs to be tweaked. While in running mode, set CV29=38 (or another appropriate value if you, for example, have analog conversion turned off). This is received at the common 2 digit address and BOTH decoders switch to 4 digit addressing and split apart. Program them with a consist of the 4 digit address set and when you are done, set each individually in OPS mode back to CV29=6 (or whatever) to put both back into 2 digit addressing. To initially set each decoder to a different 2 and 4 digit address, disconnect one decoder at a time and set it's 2 and 4 digit addresses in service or operations mode individually. The advantage of this approach is that BOTH decoders will respond to function commands. They should be initially set so that functions do not overlap.
[ Top ]
After each DCC installation (or major change of the installation) I like to write up the process. I do this to document what I did so that I can figure it out later and also to help others along with their own installations.
Every installation is a little different so sometimes you have to improvise. If you want to see the specifics of the installations, here are links to other pages in my web site and elsewhere on the web with DCC installation information. If anybody has written up similar pages, I'll list them here as well if you'd like.
| Decoder Type | Engine | Sound System Type | Link | Author |
|---|---|---|---|---|
| Digitrax DG580L
NCE D408 |
Aristo RS-3 | Aristo Digital
Dallee |
RS-3 Tips | George Schreyer |
| Digitrax DG580L
Zimo MX65S/N |
Lionel Atlantic | PH Hobbies | Atlantic Tips | George Schreyer |
| Lenz LE230
Digitrax DG580L Zimo MX65S/N NCE D408SR NCE D808 |
Aristo Pacific | Aristo Digital | Pacific Tips | George Schreyer |
| Digitrax DG580L
DG583S |
LGB 2060 | Soundtraxx DSX | DCC Installation in the LGB 2060 | George Schreyer |
| Digitrax DG580L
MRC AD320 Zimo MX65S/N |
Aristo 0-4-0 | Dallee | 0-4-0 Tips | George Schreyer |
| Digitrax DG580L | Aristo C-16 | DCC CONVERSION of ARISTOCRAFT C-16 | Ross Webster | |
| Digitrax DG380 | Bachmann Shay | Bachmann Shay DCC Installation Instructions | Ross Webster | |
| Digitrax DG380 | Bachmann Climax | Bachmann Climax DCC Installation Instructions | Ross Webster | |
| Lenz LE230 | Bachmann Shay | Sierra | DCC and Digital Sound Installation in the Shay | George Schreyer |
| MRC AD320 | Bachmann Climax | DCC and Sound in the Bachmann Climax | Jim Banner | |
| Lenz LE230 | Bachmann Climax | Sierra | DCC Installation in the Climax | George Schreyer |
| Zimo MX65S/N | Aristo FA-1 | Sierra | DCC Installation in the FA-1 | George Schreyer |
| Digitrax DG580L | LGB Uintah Mallet | LGB | LGB Uintah Mallet DCC Conversion # 5120882 | Ross Webster |
| Digitrax DG580L | USA Trains NW-2 | Dallee | USA NW-2 DCC Conversion | Ross Webster |
| Digitrax DG580L | Aristo U-25 | Dallee | AristoCraft U 25 DCC Conversion | Ross Webster |
| Digitrax DG580L
NCE D408SR |
Aristo Doodlebug | Doodlebug Tips | George Schreyer | |
| NCE D408SR | Aristo SD45 | Sierra | SD45 Tips | George Schreyer |
| NCE D808 | USA Trains GP9 | DSX | GP9 Tips | George Schreyer |
| Digitrax DG383AR | AristoCraft RDC | TBD | RDC Tips | George Schreyer |
| Digitrax DG583S | Bachmann Heisler | Sierra | Heisler Tips | George Schreyer |
| Digitrax DG580L
Digitrax DH123 |
Lionel Handcar | none | Lionel Handcar Tips | George Schreyer |
| Digitrax DG580L
NCE D408SR |
Lehmann Porter | none | Lehmann Porter Tips | George Schreyer |
| Digitrax DG583S | AristoCraft Rogers 2-4-2 | Sierra | Aristo Rogers 2-4-2 Tips | George Schreyer |
| Digitrax DH123D | Bachmann 2nd Generation Big Hauler | Bachmann analog | Bachmann Big Hauler Tips | George Schreyer |
| Digitrax DG583S | Bachmann 3rd Generation Big Hauler | Bachmann analog | Bachmann Big Hauler Tips | George Schreyer |
| Digitrax DG583S | Bachmann 5th Generation Big Hauler | Bachmann analog | Bachmann Big Hauler Tips | George Schreyer |
| Digitrax DG583S | Bachmann Columbia | Bachmann analog | Bachmann 2-4-2 Columbia Tips | George Schreyer |
| QSI Magnum | Bachmann Shay | QSI Magnum | Bachmann Shay Tips | George Schreyer |
| Digitrax DG583S | LGB 2017 and Powered Tender | Sierra | LGB 2017 and Powered Tender Tips | George Schreyer |
| Digitrax DG580L
Digitrax DG583S |
AristoCraft C-16 | Sierra | C-16 Tips | George Schreyer |
| MRC AD320
Digitrax DG583S |
AristoCraft Classic Railbus | Sierra | Aristo Classic Railbus Tips | George Schreyer |
| QSI | AristoCraft Pacific (new version) | QSI | New Aristo Pacific Tips | George Schreyer |
| MRC AD322 | Aristo FA-1 | AD322
DG583S |
DCC Installation in the FA-1
Battery Power Plus DCC |
George Schreyer |
| MRC AD322 | Aristo FB-1 | AD322 | DCC Installation in the FA-1 | George Schreyer |
| MRC AD322 | Bachmann 3rd Generation Big Hauler | Bachmann Analog | Bachmann Big Hauler Tips | George Schreyer |
| QSI Magnum | LGB 22232 | QSI | DCC Installation in LGB 22232 | George Schreyer |
| DG583S | Aristo Center Cab | none at this time | DCC Installation in Center Cab | George Schreyer |
| MRC AD320 | Lionel James | Bachmann analog | DCC Installation in James | George Schreyer |
| ESU LokSound V3.5 | Bachmann Davenport | LokSound | DCC Installation in the Davenport | George Schreyer |
| Digitrax DH123D
ESU LokSound V3.5 |
Bachmann Railtruck | none
LokSound |
DCC Installation in the Railtruck | George Schreyer |
| Digitrax DH163D
Soundtraxx Tsunami |
USAT Speeder | none
Tsunami |
DCC Installation in the Speeder | George Schreyer |
| DH163D | Bachmann Hand Car | none | Handcar DCC Conversion | George Schreyer |
| DH163D | AristoCraft PCC | SFX064D | PCC DCC Conversion | George Schreyer |
| Digitrax DH465 | LGB Mars Flyer | none | Mars Flyer DCC Conversion | George Schreyer |
| NCE D808SR | USAT F3A | Digitrax SFX0416 | USAT F3A DCC Conversion | George Schreyer |
[ Top ]
Digitrax uses "hexadecimal" characters in some cases on their throttle displays. This is unnatural to most non-computer savvy DCC users but it is necessary to pack sufficient information into two or four characters on the limited display size. I quoted the word hexadecimal in the first sentence because Digitrax has used some non-standard definitions for hexadecimal characters sometimes.
In the very early days of computers, the programmers worked in the native language of the computers, binary representation. All data was represented as strings of 1 or 0 characters. To a real hacker this notation is readable, but to most of us it is gibberish. Programmers tried other character sets to represent the binary words in a form that is slightly more human readable. Digital Equipment Corporation adopted a base 8 number system, commonly called octal, to represent the individual bits. Each octal character represents 3 binary bits. This was convenient as the original 12 bit word of the PDP-1 could be represented as 4 octal characters instead of 12 bits. When the 8 bit microprocessors were invented, the designers choose to represent each 8 bit word as two hexadecimal characters. Hexadecimal literally means "sixteen." In this case, 4 bits are represented by one base 16 numeric character. Since our decimal numeral set has only ten characters available, the letters A through F were borrowed from the alphabetic character set and tacked on the end of the existing ten characters to make a 16 character set.
| 4 Binary Bits |
|
|
| Hexadecimal Value |
|
|
| Decimal Value |
|
|
If you want to program CV29 (an important configuration variable) you'll have to translate the decimal values given in Digitrax's documentation into a hexadecimal value to enter into the throttle. There is a conversion table listed in the back of the decoder programming manual and I have supplied a similar table below.
If you want to program CV13 (the analog conversion control CV) you have to go a step further. To determine which functions that you want to be on when decoder converts to analog mode, you have to define an 8 bit word with each bit representing a function to be turned on. Then you have to calculate the decimal value of this 8 bit word and then convert that into 2 hexadecimal characters. The manual does not describe how to do this. The table below shows the bit assignments for each function and the decimal value associated with each bit. Once you have determined which functions that you want to be on, then you add up the decimal values for the bits that are on. Then you take that decimal value to the conversion table to determine the hexadecimal value.
Alternately, you can break the 8 bit word into two four bit values and then assign a hexadecimal character directly to each set of 4 bits.
| Bit Position |
|
|
|
|
|
|
|
|
| Bit Decimal Value |
|
|
|
|
|
|
|
|
| Digitrax CV13 Bit Title |
|
|
|
|
|
|
(Whistle) |
|
| Functions On | Binary Representation | Decimal Value | Hexadecimal Value |
| Everything on |
|
|
|
| Front and rear headlights only |
|
|
|
| Everything BUT sound |
|
|
|
| Dec Hex | Dec Hex | Dec Hex | Dec Hex | Dec Hex | Dec Hex | Dec Hex | Dec Hex |
|---|---|---|---|---|---|---|---|
| 00 = 00 | 32 = 20 | 64 = 40 | 96 = 60 | 128 = 80 | 160 = A0 | 192 = C0 | 224 = E0 |
| 01 = 01 | 33 = 21 | 65 = 41 | 97 = 61 | 129 = 81 | 161 = A1 | 193 = C1 | 225 = E1 |
| 02 = 02 | 34 = 22 | 66 = 42 | 98 = 62 | 130 = 82 | 162 = A2 | 194 = C2 | 226 = E2 |
| 03 = 03 | 35 = 23 | 67 = 43 | 99 = 63 | 131 = 83 | 163 = A3 | 195 = C3 | 227 = E3 |
| 04 = 04 | 36 = 24 | 68 = 44 | 100 = 64 | 132 = 84 | 164 = A4 | 196 = C4 | 228 = E4 |
| 05 = 05 | 37 = 25 | 69 = 45 | 101 = 65 | 133 = 85 | 165 = A5 | 197 = C5 | 229 = E5 |
| 06 = 06 | 38 = 26 | 70 = 46 | 102 = 66 | 134 = 86 | 166 = A6 | 198 = C6 | 230 = E6 |
| 07 = 07 | 39 = 27 | 71 = 47 | 103 = 67 | 135 = 87 | 167 = A7 | 199 = C7 | 231 = E7 |
| 08 = 08 | 40 = 28 | 72 = 48 | 104 = 68 | 136 = 88 | 168 = A8 | 200 = C8 | 232 = E8 |
| 09 = 09 | 41 = 29 | 73 = 49 | 105 = 69 | 137 = 89 | 169 = A9 | 201 = C9 | 233 = E9 |
| 10 = 0A | 42 = 2A | 74 = 4A | 106 = 6A | 138 = 8A | 170 = AA | 202 = CA | 234 = EA |
| 11 = 0B | 43 = 2B | 75 = 4B | 107 = 6B | 139 = 8B | 171 = AB | 203 = CB | 235 = EB |
| 12 = 0C | 44 = 2C | 76 = 4C | 108 = 6C | 140 = 8C | 172 = AC | 204 = CC | 236 = EC |
| 13 = 0D | 45 = 2D | 77 = 4D | 109 = 6D | 141 = 8D | 173 = AD | 205 = CD | 237 = ED |
| 14 = 0E | 46 = 2E | 78 = 4E | 110 = 6E | 142 = 8E | 174 = AE | 206 = CE | 238 = EE |
| 15 = 0F | 47 = 2F | 79 = 4F | 111 = 6F | 143 = 8F | 175 = AF | 207 = CF | 239 = EF |
| 16 = 10 | 48 = 30 | 80 = 50 | 112 = 70 | 144 = 90 | 176 = B0 | 208 = D0 | 240 = F0 |
| 17 = 11 | 49 = 31 | 81 = 51 | 113 = 71 | 145 = 91 | 177 = B1 | 209 = D1 | 241 = F1 |
| 18 = 12 | 50 = 32 | 82 = 52 | 114 = 72 | 146 = 92 | 178 = B2 | 210 = D2 | 242 = F2 |
| 19 = 13 | 51 = 33 | 83 = 53 | 115 = 73 | 147 = 93 | 179 = B3 | 211 = D3 | 243 = F3 |
| 20 = 14 | 52 = 34 | 84 = 54 | 116 = 74 | 148 = 94 | 180 = B4 | 212 = D4 | 244 = F4 |
| 21 = 15 | 53 = 35 | 85 = 55 | 117 = 75 | 149 = 95 | 181 = B5 | 213 = D5 | 245 = F5 |
| 22 = 16 | 54 = 36 | 86 = 56 | 118 = 76 | 150 = 96 | 182 = B6 | 214 = D6 | 246 = F6 |
| 23 = 17 | 55 = 37 | 87 = 57 | 119 = 77 | 151 = 97 | 183 = B7 | 215 = D7 | 247 = F7 |
| 24 = 18 | 56 = 38 | 88 = 58 | 120 = 78 | 152 = 98 | 184 = B8 | 216 = D8 | 248 = F8 |
| 25 = 19 | 57 = 39 | 89 = 59 | 121 = 79 | 153 = 99 | 185 = B9 | 217 = D9 | 249 = F9 |
| 26 = 1A | 58 = 3A | 90 = 5A | 122 = 7A | 154 = 9A | 186 = BA | 218 = DA | 250 = FA |
| 27 = 1B | 59 = 3B | 91 = 5B | 123 = 7B | 155 = 9B | 187 = BB | 219 = DB | 251 = FB |
| 28 = 1C | 60 = 3C | 92 = 5C | 124 = 7C | 156 = 9C | 188 = BC | 220 = DC | 252 = FC |
| 29 = 1D | 61 = 3D | 93 = 5D | 125 = 7D | 157 = 9D | 189 = BD | 221 = DD | 253 = FD |
| 30 = 1E | 62 = 3E | 94 = 5E | 126 = 7E | 158 = 9E | 190 = BE | 222 = DE | 254 = FE |
| 31 = 1F | 63 = 3F | 95 = 5F | 127 = 7F | 159 = 9F | 191 = BF | 223 = DF | 255 = FF |
Digitrax sometimes uses real hexadecimal values and sometimes they distort it. One distorted example is the 2 digit addressing method used on the old DT100 throttle. From the table above, you'll notice that the hexadecimal characters start showing up at a decimal value of 10. However, the 2 digit locomotive address range is 0 to 127 with the "mixed mode hexadecimal" values not showing up until decimal value 100. They do this so that you can more easily scroll through the first hundred addresses and map those to the last 2 digits of your loco numbers. Since few of us actually have more than a hundred locos equipped with DCC, they are trying to make it easier on us. If you want to number a loco or access a CV past decimal address 99, then you'll can to refer to your DCC throttle manual or the table below to determine the proper characters. Basically, all addresses in the range of 100 to 109 start with an A, those in 110 to 119 start with a B and those in the range of 120 to 127 start with a C. The second digit is the last digit of the decimal address.
| Dec MM | Dec MM | Dec MM |
|---|---|---|
| 0-99 = 0-99 | ||
| 100 = A0 | 110 = b0 | 120 = c0 |
| 101 = A1 | 111 = b1 | 121 = c1 |
| 102 = A2 | 112 = b2 | 122 = c2 |
| 103 = A3 | 113 = b3 | 123 = c3 |
| 104 = A4 | 114 = b4 | 124 = c4 |
| 105 = A5 | 115 = b5 | 125 = c5 |
| 106 = A6 | 116 = b6 | 126 = c6 |
| 107 = A7 | 117 = b7 | 127 = c7 |
| 108 = A8 | 118 = b8 | |
| 109 = A9 | 119 = b9 |
[ Top ] [ Home ] [ Up ] [ Previous Page ] [ Next Page ]
This page has been accessed times since Oct 27, 1998.
© 1998-2011 George Schreyer
Created Oct 27, 1998
Last Updated October 19, 2011